

虚拟手术中力觉模型建模方法研究

作者:臧爱云, 原魁
单位:中国科学院自动化研究所高技术创新中心
1 引言
虚拟手术是虚拟现实技术在医学领域中的重要应用, 虚拟手术系统可以使医务人员沉浸于计算机生成的虚拟手术环境内, 通过虚拟手术器械体验和学习如何进行各种手术, 并培养应付各种突发情况的能力。因为虚拟手术系统具有很强的灵活性, 用户可以根据自己的需要重复进行各种必要的操作训练, 并可以得到根据专家经验建立的专家手术系统的指导, 大大节约培训医务人员的费用和培训时间, 从而迅速提高学习者的手术及其它操作的技能。此外, 虚拟手术系统还可以使医生在进行复杂手术前进行各种必要的手术预演, 提高正确处理各种突发情况的能力, 不但可以降低非熟练人员进行实习手术时的风险, 也可以大大提高手术的成功率。
虚拟手术系统主要由虚拟人体/ 器官视景生成系统和虚拟手术器械两部分组成, 前者主要完成虚拟人体或虚拟器官的实时生成和显示, 而后者则使用户可以通过带有力反馈和定位功能的虚拟外科手术器械进行各种手术操作练习, 二者缺一不可。虚拟手术中虚拟手术器械接触或切割虚拟人体和器官时,为了使操作者有真实的沉浸感, 所采用的力觉模型根据人体组织不同、切割深度以及切割速度的不同, 控制虚拟手术刀上的力觉反馈装置产生实时相应变化的力, 以达到真实的触觉效果。
如何建立虚拟环境的真实有效的力觉模型成为虚拟手术技术研究中亟待解决的关键问题。人体的软组织如: 动脉、肌肉、皮肤、肝脏等都是粘弹性体2 , 在力学特征方面有许多相似之处, 它们都有滞后、松弛、蠕变, 各向异性及非线性的应力- 应变关系等特点, 把所有这些因素都综合在一起, 怎样用简单而精确的模型来表达, 是一个迫切的问题。至今还没有活组织本构方程方面的资料, 没有本构关系, 就只能理论和实验的相互参照反复进行分析, 从定性和定量两方面对问题有所理解3 4 。
理论上常用的力觉建模方法有弹簧- 质点模型和有限元模型两种, 质点弹簧模型和有限元法是根据物理作用来模拟物体变形的主要造型技术。由于前者相对简单, 已被应用到许多领域。然而, 质点弹簧模型牵涉到繁复的刚度矩阵公式化程序, 而且决定动态特性的微分方程系统必须满足一些条件, 以避免在求数值解时失稳。有限元法被应用到一些较准确的变形模型上, 以对软组织的应力- 应变关系作更精密的分析, 如生物力学、手术模拟等。虽然有限元法较为准确, 但涉及大量繁复的计算, 不适合实时的交互应用。这些物理模型的计算较为繁复,不适用于要求高更新率、实时可视化以及触觉式反馈的虚拟手术应用。
上述常用方法的都是基于理论上的力觉建模,迄今为止还没有一个标准的方法仿真切割过程, 也很少有文献对实际手术刀切割软组织过程中刀刃的真实受力以及对软组织变形进行研究、分析和建模。本文提出一种实时采集在切割过程中手术刀刃对人体组织器官施加的力, 以及手术刀姿态、位置和运动信息, 从能量交换和变形上详细分析切割过程中刀刃上的受力与手术刀的姿态、位置和速度等信息之间的关系。对确定生物材料断裂强度和粘弹性变形应力- 应变关系的方法进行了研究。本文讨论的主要内容分为4 部分: 1 介绍了手术刀力采集装置; 2 软组织切割试验及分析; 3 对力觉建模方法进行了研究; 4 结论。
2 手术刀力采集设备
为了实时采集切割过程中手术刀刃上的受力,以及手术刀的位姿和速度信息, 我们研制开发了一种结构紧凑的手术刀力采集设备, 该设备是在真实手术刀上改造获得的, 包括: 手术刀切割子系统,一个数字数据获得子系统和数据处理子系统。数字数据获得子系统把手术刀切割子系统采集到的力、速度、位姿等数据信息存储为文件, 由数据处理子系统来处理。
2.1 手术刀力切割子模块
手术刀切割子模块的原理如图1 所示, 手术刀外面通过转轴安装一个没有铁磁效应的外套, 安装在外套侧面的三维跟踪装置检测手术刀的位置和姿态信息, 如图2 所示; 加速度计安装在刀柄外套里用来测量手术刀运动速度; 位于刀柄下方的触力传感器检测刀柄施加在其上的压力, 根据杠杆平衡原理FL = f l , 可计算出刀刃上的作用力f 。
系统中选用的手术刀是常用的一种应用在外科手术中的手术刀, 这种手术刀的刀片是可拆卸的,可方便更换新的刀片。刀片刀刃曲线是一段直线和一个圆弧组合在一起的。用该手术刀切割物体过程中, 一般是刀片刀刃的前端圆弧段与被切割物体接触, 为了简化处理, 假设接触过程中刀刃与被切割物体都是点接触。手术刀切割物体时受到使它绕转轴逆时针旋转的力f , 刀柄旋转微小的角度刀柄后端就会和触力传感器的受力球接触, 受到一个绕转轴顺时针旋转的平衡力F。触力传感器选用的是Honerwell 公司提供的精确、可靠的产品FSL05N2C , 传感器内含有经特殊微切削硅传感芯片, 低功耗、无放大、无补偿的惠斯顿电桥在500g 量程中能够输出恒定的mV 信号, 灵敏度为0112mV/ g。
切割时手术刀倾斜的角度θ不同, 刀片和切割平面接触的接触点不同, 力臂l 相应变化:
l = OA 3 cos (θ- α) (1)
由 F 3 L = f 3 ( OA 3 cos (θ- α) ) (2)
得到刀刃上的切割力为:

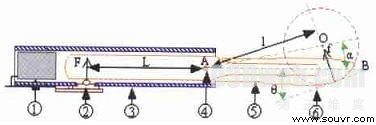
图1 手术刀力采集设备内部结构示意图
1 加速度计 2 触

