

虚拟手术中力觉模型建模方法研究

4 转轴 5 手术刀 6 切平面
该三维跟踪器是Polhemus 公司的Fast rack 产品,它精度在X , Y和Z 轴向达到0108 cm RMS , 在角度上达到0115°RMS , 该跟踪设备可以通过串口和USB 口把三维的高精度的位置和姿态数据信息传送到计算机, 使用非常方便。所要确定的是刀刃的位置信息, 不是刀柄的, 但是为了不妨碍切割操作跟踪器只能安装在刀柄外套上, 跟踪器给出的是它所在的位姿信息。需要用坐标旋转和坐标平移得到刀刃的位置信息。
2.2 系统校正
手术刀在装配上和力臂测量中, 会有一些因素产生误差, 为了使采集到的数据更加准确, 采用一个精度为015 克的电子天平, 来校正手术刀力采集装置。如图2 所示, 手术刀刃与电子天平接触, 产生一个作用力和反作用力, 电子天平显示力的大小为f′, 这个力就是切割物体时刀刃上的切割力。使力f′从小到大变化, 将试验力f′和采集计算得到的力f 进行比较, 发现刀刃上得真实受力f′与计算机根据力矩平衡计算获得的切割力f 变化趋势相同, 但并没有重合, 它们之间的关系, 用式4表示
f′= a 3 f + b (4)

图2校正手术刀力采集装置 三维跟踪设备

图3 使用手术刀力采集装置进行试验
试验确定出a , b , 对系统进行校正。校正后进行试验发现, 该手术刀力采集装置能够准确地采集到刀刃上的受力, 精度能够达到0101 牛顿。由于该力采集装置结构紧凑、重量轻、精度高、不妨碍操作者的动作, 因而可以方便地使用在外科手术或切割试验中, 准确采集到切割过程中刀刃上的受力。
3 软组织切割试验和分析
使用上述的手术刀力采集装置进行切割试验,试验采用的是猪身体上的软组织。为了避免试验中所采用软组织性能与活体组织性能变化很大, 从屠宰场刚杀的猪身体上取得样本, 在两个小时内送到实验室, 浸泡在生理盐水里。试验前先把样本切割成1cm 厚、6cm 宽、15cm 长的长条; 固定在固定架上, 两端用夹子加紧, 避免样本移动。试验如图3 所示, 切割时计算机实时采集力、倾斜角度、位置信息。
由于软组织都具有粘弹性特征, 表现出滞后、松弛和蠕变的性质, 具有各向异性的特点, 而且很多的不确定因素影响, 如温度等, 使得在任何两次切割同一个软组织时, 所采集到的力并不会完全相同。
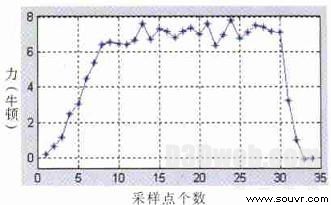
图4 切割软组织采集到的力
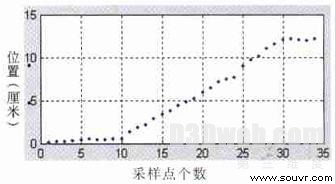
图5 切割软组织采集到的刀刃位置
图4 所示曲线是一次切割过程中采集数据处理后得到的刀刃上的受力曲线图。图5 所示的是采样得到的刀刃位置数据, 切割速度较快, 平均为2cm/ s , 所以平均力较大, 这和所选用的样本的组织也有关系。从图中可以看出手术刀切割可变形软组织时, 中间切割过程刀刃上的受力并不是一条平滑的曲线, 而是象锯齿波形的曲线。这说明在实际中用锋利工具切割软组织时, 切割力并不是像理论中所描述的那样, 是连续、光滑的曲线, 而是有数个作用力增加和下降的过程组成。
为了能够详细地描述出这种过程, 本文把手术刀切割可变形软组织简化为三种形式的能量变换:储存在可变形物体里的弹性能量, 切割工具所作的功和物体被切割开来时所需的不可逆转的功。其它因素如摩擦也消耗能量, 本文暂不描述摩擦所产生的影响。切割过程简化为可变形软组织三种形式状态的相互变换: 变形, 裂开和切割, 如图6 所示。
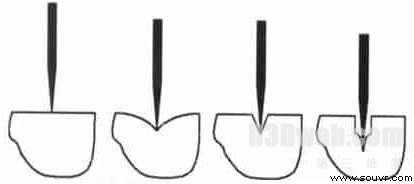
图6 手术刀—软组织交互作用四种状态
①接触 ②变形 ③裂开 ④切割变形
每一种状态都可以被看成两种能量的交换: ⑴在变形过程中, 手术刀所作的功和储存在可变形软组织中的弹性能量相互交换, 这种能量交换是可恢复性的, 当手术刀离开时, 软组织就会恢复到原来的状态; ⑵当软组织变形达到所能承受的边界值时, 会瞬间在手术刀的作用下裂开, 如图6 中所示的从②状态到③状态, 这时因为手术刀并没有运动, 所以所做的功为零; ⑶在切割过程中, 图中所示的④状态, 手术刀所做的功等于用在断裂所消耗的不可逆转的能量和软组织变形所储存的弹性能量, 即作用在样本裂开的功是断裂强度和断裂伸展的共同作用之和。
从接触变形到裂开的边界值, 随着软组织弹性变形增大, 切割力是一个增长的过程; 当软组织瞬间裂开, 弹性变形变小, 手术刀上的受力会突然下降。这种分析和试验中所获得的力变化曲线非常吻合。这说明本文所采用的力采集方法是有效的、可行的。
因为生物组织不是一个密度均匀、各向性能相同的材料, 是具有复杂力学性能的材料体。在不同位置, 材料的杨氏模量, 也就是应力和应变之间的关系不同, 因而软组织不同位置断裂强度并不会相同, 软组织断裂开的临界值也不同如图4 中曲线所示的那样。
&n

