

基于虚拟现实技术的多功能肌电假肢控制系统开发平台

作者:余龙 张志勇 陶丹丹 陈亮 邹国栋 李光林
摘 要 通过虚拟现实假肢控制系统,研究肌电解码控制的多功能假肢的实时操控性能,便于以后对影响多功能肌电假肢临床控制性能的动态因素及如何提高和改善多功能肌电假肢控制性能进行详细的研究。另外,肌电假肢的使用存在训练过程漫长、动作笨拙、使用者精神负担大等问题,利用虚拟手代替真实肌电手进行训练,可以营造一种轻松训练环境。本系统利用SolidWorks绘制三维手臂,再用虚拟现实三维建模方法和建模语言(VRML)节点语法编辑出完整的虚拟手臂场景,利用MATLAB的simulink搭建虚拟手控制平台,实现虚拟世界和外界的交互。该系统可以通过从残疾人残余肌肉采集的肌电信号进行解码、时域特征提取、动作类型识别等操作,最终实现用肌电信号控制虚拟手臂。
1 引言
肌电假肢使用的训练过程漫长、动作笨拙,通常患者学习去使用假肢的开始阶段非常的痛苦,而且不断反复,容易出错,甚至可能使病人丧失对假肢的信心,所以,通过开发虚拟仿真环境,可以营造一种轻松训练环境,减轻病人在初始阶段的痛苦。
目前大多数的研究工作主要针对假肢控制算法的可行性、性能及相关问题进行理论上的探讨和分析,还无法对多功能假肢的实时操控性能进行研究和评价,从而阻碍了多功能假肢系统研究及实用化的进程。将虚拟现实技术引入到肌电假肢控制的设计开发进程中,在没有多功能物理假肢系统的情况下,实现多功能假肢控制系统的研究、开发及实时性能评价,将大大加快多功能肌电假肢的实用化进程[1]。
本文先用SolidWorks画了了一个三维的机械手臂,然后用vrml语言编辑成虚拟手场景,然后利用工具箱导入到MATLAB的simulink中,利用MATLAB建立训练和实时控制系统。通过简单的训练,得到手部的六个基本动作的LDA分类器,然后通过分类器实时的判断残疾人所要做的动作。
2 系统实现
该系统的实现主要有两部分,第一部分是LDA分类器的训练,第二部分是虚拟手的实时控制。整个系统流程如下图1所示。
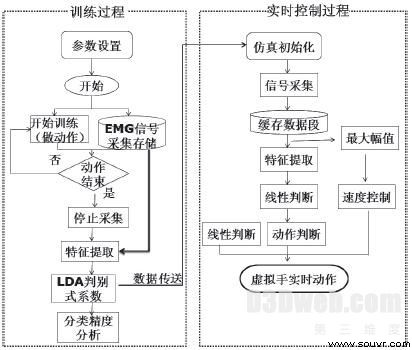
图1 系统流程图
其中训练过程包括手臂基本动作的肌电信号采集、肌电信号放大及预处理、肌电信号的解码和特征提取、分类器的系数运算、分类器的测试和精度分析。虚拟手的实时控制主要肌电信号的采集与处理、特征提取、动作分类判断等过程。
2.1 分类器训练
分类器是本系统算法的核心,分类器的好坏直接影响的手部动作的判断,从而影响到虚拟手的实时控制。
一般手部的基本动作包括6个动作:手张开、握拳、腕内旋、腕外旋、腕内收、腕外展。一般手部动作都是其中的一种或者两种的组合,所以本系统主要对这六个动作进行训练,如下图2所示:

图2 分类器训练的六个动作
目前,用于表面肌电信号的模式分类方法很多,但总体上可归为两大类:基于统计的分类器、模糊分类器、模式聚类分类器和神经网络分器。但是之前的研究工作(Hargrove等人2007年)表明,LDA分类器的准确率也不输于这些复杂的方法,同其他分类方法相比,LDA分类器具有实现更容易和训练更迅速等优点[2]。所以本系统采用LDA分类器,LDA分类器生成要经过信号的采集与预处理、特征提取、对样本的统计计算出分类器的线性判断式,如下图3所示。
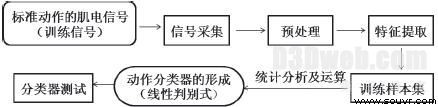
图3 分类器的形成过程
表面肌电信号的时域特征与频域特征或时—频域特征相比,具有计算量简单、获取迅速等优点,可以获得相对较好的分类特性。跟据 Hudgins等人的研究成果,仅需提取平均绝对值、过零率、波长和符号改变斜率4 个时域特征,就可以获得较好的分类结果。因此本系统即采用时域的这四个参数作为提取的时域特征对象[3]。
LDA判别思想是:对于每一种运动类型的EMG数据,分别求出该类型所包含的每段数据对应于所有运动类型的后验概率比较所有运动类型后验概率的值,值最大的运动类型作为该段数据的归属运动类型。后验概率是特征向量f所决定的运动类型Cg的概率,可表示为:

其中,P(Cg)是先验概率,表示似然概率P(f)表示特征向量f的概率

得到分类器函数以后,系统会自动进行测试并导入到实时系统中。
2.2 虚拟手臂场

