

基于虚拟现实技术的多功能肌电假肢控制系统开发平台

虚拟现实系统通过使用各种先进的硬件技术及软件工具,设计出合理的硬件、软件及交互手段,使参与者能交互式地观察和操纵系统生成的虚拟世界。将虚拟现实技术应用于多自由度假肢的控制首先要做的是虚拟手模型的建立[3]。
本系统建立虚拟手场景经过以下几步:测量中国上海科生生产的实体假手;根据测量数据在SolidWorks中画出三维的手臂,再把这个三维手臂导入到VrmlPad软件中,用VRML语言进行编辑与描述[4],过程如下图4所示。

a) 实体手 b)三维机械手 c) 虚拟手
图4 虚拟手制作过程
再将形成的虚拟手场景导入到simulink中,在simulink中搭好EMG信号实时采集和处理的其他程序,并把分类器函数导入。这样就大检查完整的虚拟现实实时控制系统[6]。
3 系统的实验及分析
由于肌电信号非常微弱,采集环境比较复杂,在传递过程中很容易受外电场和电路噪音的影响。
所以每次做实验前都要检测一下信号质量和稳定性,然后打开系统,进入训练界面对手部基本动作训练,如下图5所示。

图5 实时控制系统训练界面
当训练完之后,系统会自动的对所得的分类器进行测试,并把分类器函数传入到实时控制系统中,下图6是其中一个被试者所得的分类器精度。
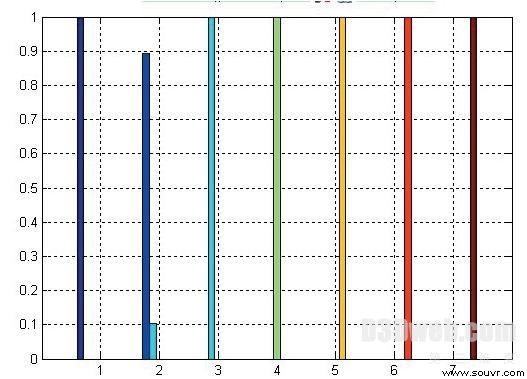
图6 分类器精度测试结果
其横坐标表示对于的动作类型,其中1-6表示手部的6个基本动作,7表示静止,纵坐标表示分类器判断是该动作的比例,上图中可知分类器的分类精度还是比较高的,只是把第二类动作的10%左右的点判断成第三类动作,其他的都基本判断对了。
当训练好了之后,点击开始实时控制就可以进入实时控制系统界面,如下图7所示。
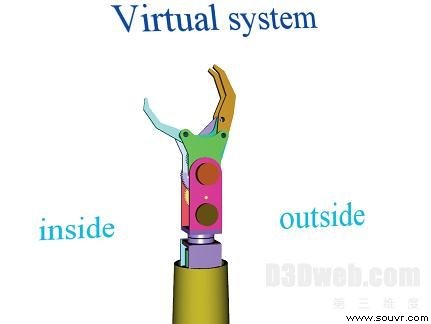
图7 实时控制界面
这时就可以通过外界人的表面肌电信号自由的控制里面的虚拟手臂,达到人机交互的效果,下图9是一个被试者通过表面肌电信号控制虚拟手的效果图。

图8 虚拟手控制效果图
上图中被试者手臂贴的就是采集肌电信号的电极,信号经电极采集,经放大器放大,预处理和特征提取,然后用提取的特征向量带入分类器函数,实时的判断出当前所做动作。不过一点比较重要,就是当训练完成以后,贴在肌肉表皮的电极不能随意的移动,否则分类器的精度就会下降。
4 结论
本文为了解决残疾人用实体肌电手锻炼困难的问题,开发了一套简单实用的虚拟手臂锻炼系统,这套系统不但使残疾人能轻松愉快的进行锻炼,而且有利于研究肌电解码控制的多功能假肢的实时操控性能。
参考文献
[1] Sally Adee.The Revolution Will Be Prosthetized. IEEESPECTRUM.2009:45~48.
[2] Yonghong Huang, Kevin B. Englehart, Bernard Hudgins, etal. A Gaussian Mixture Model Based Classification Schemefor Myoelectric Control of Powered Upper Limb Prostheses.IEEE Transaction on Biomedical Engineering, 2005, 52(11):1801~1811.
[3] Dario Farina, Roberto Merletti, and Roger M. Enoka, “Theextraction of neural strategies from the Surface EMG,” J ApplPhysiol, vol.96, pp.1486-1495, 2004.
[4] M Cavazza,R Earnshaw,N M Thalmann,D Thalmann.Motion Control of Virtual Humans.IEEE Computer Graphics andApplications,1998,18(5):24一3.
[5] 段新昱.虚拟现实基础与 VRML 编程.高等教育出版社.2004: 40~87.
[6] 贾秋林、袁冬莉等.MATLAB7.x/simulink/

