

大型弹道式飞行器六自由度仿真研究与展望

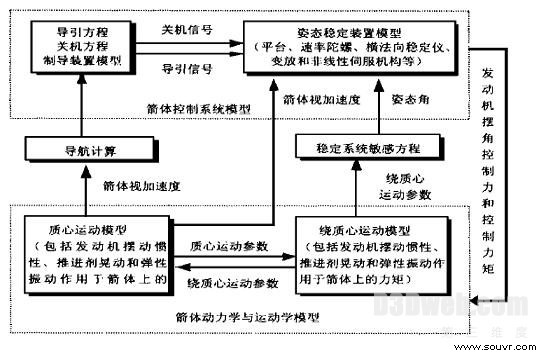
3.1 采用多种运动形态的一体化建模, 基本形成了制导回路闭环仿真六自由度仿真原理框图如图321 所示。
框图
由图可见, 六自由度仿真是全箭运动特性的描述和模拟, 揭示了箭体内外各种激励因素的相互作用和影响, 把箭体质心运动和绕质心运动进行一体化建模, 考虑了多种运动形态(刚体运动、弹性振动、推进剂晃动、发动机摆动) 的铰链和影响, 接入控制系统实装(或局部用数学模型) 基本实现制导回路闭环仿真,这是传统三自由度仿真无法实现的。
3.2 全面研究了各种运动形态之间的相互作用和影响
箭体一体化建模仍然依据变质量质点系动量和动量矩定理, 但它不同于传统的三自由度模型, 而是充分考虑了各种运动形态的共存和它们之间的铰链影响, 如箭体质心运动视加速度为:
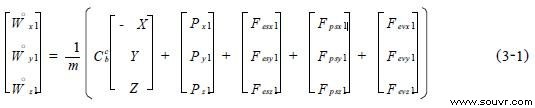
等式右边一、二两项分别为空气动力和发动机推力在箭体坐标系的投影, 是传统三自由度模型也有的, 而后三项分别为发动机摆动、推进剂晃动和弹性振动作用于箭体上的力在箭体坐标系的投影, 这三项是六自由度模型独有的, 它们各自的表达式可充分说明各种运动之间的铰链影响, 为减小篇幅不再展开讨论。
3.3 采用时变、全量非线性方程描述, 比传统模型具有更好的适应性
采用线性化增量方程还是采用时变非线性全量方程, 是传统三自由度仿真与六自由度仿真最根本的区别之一。现以传统三自由度弹体俯仰运动模型的局限性为例, 从反面证明采用全量非线性模型的必要性。
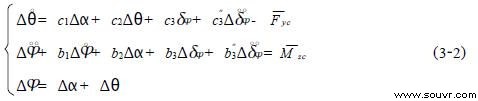
该方程只能在严格的小扰动假设条件下才能使用, 这是因为:
3.3.1 所有运动变量 均由三角函数台劳展开取其一次项得到, 即假定
均由三角函数台劳展开取其一次项得到, 即假定
 显然, 当
显然, 当 较大时, 小扰动假设将不成立, 模型将会失真, 严重时该模型不能使用。
较大时, 小扰动假设将不成立, 模型将会失真, 严重时该模型不能使用。
3.3.2 所有运动方程系数b1、b2、b3、c1、c2、c3 均为箭体运动状态的组合函数:
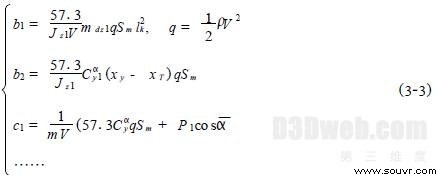
当飞行状态变化时, 所有运动方程系数都是变化的, 在线性化增量方程中, 把运动方程系数在若干个特征点上固化, 等于把飞行状态程序化, 忽略了飞行状态摄动对姿态运动的影响, 如果飞行状态偏离“标准状态”就会造成误差, 扰动较大时, 误差将无法接受。
3.3 (3-2) 式中第三个方程 严格说是不成立的, 因为
严格说是不成立的, 因为 以及ψ、β、μ 是不同坐标系里的欧拉角, 三者不共面, 不能代数相加, 三者之间有较复杂的坐标转换关系:
以及ψ、β、μ 是不同坐标系里的欧拉角, 三者不共面, 不能代数相加, 三者之间有较复杂的坐标转换关系:
只有在小扰动条件下满足 趋近于零时近似认为
趋近于零时近似认为 三者共面, (3-2) 式的第三个方程才近似成立, 当扰动和姿态偏差较大时, (322) 式不能使用。
三者共面, (3-2) 式的第三个方程才近似成立, 当扰动和姿态偏差较大时, (322) 式不能使用。
以上三点说明严格的小扰动条件是十分苛刻的, 若不满足, 传统的线性化增量模型将会失真。六自由度建模对飞行器运动不作任何小扰动假设, 也不进行线性化, 而是采用时变非线性全量模型, 从而避免了许多误差, 无论对大扰动还是小扰动都是适用的。
4 六自由度仿真的应用研究及其前景
六自由度仿真应用领域非常广泛, 目前已经投入使用或正在研究使用的主要有以下几个方面:
● 大扰动、大姿态偏差条件下的控制系统设计
● 飞行器系统质量评估和飞行落点预报
● 弹头再入

