

大型飞行器的面向对象仿真研究

国防科技网
作者:未知
作者单位:石家庄军械工程学院导弹工程系
摘 要:分析了大型飞行器动态飞行控制系统的数学模型,给出了其仿真系统的基本构成方案,并对制导与姿态控制的联合六自由度仿真、面向对象的仿真建模方法进行了研究。
大型飞行器是一种高新技术密集的复杂武器系统,采用飞行器仿真系统来进行作战研究和模拟训练则是一种非常重要和有效的手段[1,2]。因此,进行飞行器仿真系统的研究是非常有意义的。本文根据系统仿真的发展趋势,应用面向对象建模技术,对某型号大型飞行器进行了六自由度仿真研究。
1、飞行器仿真系统的基本构成
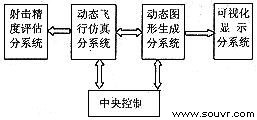
飞行器仿真系统的方块图如图1所示。它由动态飞行仿真分系统、动态图形生成分系统、可视化显示分系统、射击精度评估分系统以及中央控制台共5个分系统构成。本文主要讨论动态飞行仿真分系统。
块图
动态飞行仿真分系统由硬件和软件两部分构成。硬件部分包括仿真计算机、键盘、显示器、与控制台的通信接口、与图形处理计算机的通信接口以及与射击精度评估分系统的通信接口等。仿真计算机对不同的射击目标、标准弹道、程序角、初始对准初值及干扰,根据系统的动态仿真模型进行数值计算,计算出飞行器在空中飞行过程中各个时刻的位置和姿态,提供给监视器、控制台、图形处理计算机及射击精度评估分系统等进行实时显示和记录。软件部分包括一体化仿真软件、三个接口的I/O软件和一个发测参数数据库等。一体化仿真软件由仿真管理模块、仿真数据库模块和仿真实验运行模块组成。三个接口的I/O软件是图形处理接口I/O软件、测试记录接口I/O软件和控制台接口I/O软件,它们的主要任务就是将仿真计算的结果传送给显示及记录设备。发测参数数据库用来存储发射参数和测试参数等。
2 飞行器动态飞行控制系统的数学模型
飞行器动态飞行控制系统的结构十分复杂,为了进行系统的制导与姿态控制联合六自由度仿真,可以将系统分为控制装置和被控对象(即弹体)两大部分,这样便于分别建立控制装置的制导与姿态控制联合仿真模型和弹体的六自由度运动仿真模型,从而避免了将质心运动及其制导与绕心运动及其姿态控制人为地割裂开来进行研究的做法。
2.1 控制装置的数学模型
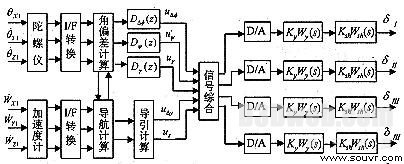
控制装置由惯性测量仪表、弹载计算机和伺服机构等组成,其结构图如图2所示。其中惯性测量仪表和伺服机构的数学模型为传递函数,而弹载计算机的数学模型为差分方程。弹载计算机的功能相当强大,它承担了控制系统的大部分任务,如导航计算、横法向导引计算、关机方程计算、工具误差补偿计算、姿态角偏差计算和数字稳定网络的计算等。
构图
2.2 弹体六自由度运动模型
弹体部分主要是弹体的六自由度运动模型、弹性振动模型、结构干扰模型和环境模型。需要指出的是弹体在空中飞行有其特殊性:其一是弹体是变质量物体;其二是弹体在空中飞行的环境是空间变的,同时也是时间变的。 因此,弹体运动模型是一个复杂的非线性时变模型。
2.2.1 质心运动模型
以往的三自由度质心运动模型一般只考虑重力、推力和空气动力三个主要作用力的影响[3]。本文则在此基础上进一步考虑了控制力、弹性振动作用力、风干扰等因素的影响,并根据变质量质点系动量定理、惯性测量原理、飞行器动力学及运动学方程,推导出了如下基于发射点重力惯性坐标系的质心运动模型:
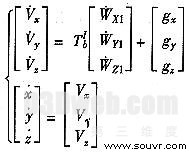
式中:[x y z]T、[Vx Vy Vz] T、[gx gy gz] T分别是飞行器在惯性坐标系中的位置向量、速度向量及其所受的地球引力加速度向量;TIb是从弹体坐标系到惯性坐标系的方向余弦矩阵;是飞行器所受的全部非质量力引起的视加速度在弹体坐标系中的3个分量,其表达式为:

式中:[PX1 PY1 PZ1] T、[RX1 RY1 RZ1] T、[FX FY FZ]T分别是飞行器在弹体坐标系中所受的推力分量、空气动力分量和干扰力分量;[QX1 QY1 QZ1] T、[TX1 TY1 TZ1] T分别是飞行器在弹体坐标系中所受的控制力分量和弹性振动作用力分量。
2.2.2 绕质心运动模型
根据变质量质点系动量矩定理、哥氏转动坐标定理、飞行器动力学及运动学方程,可推导出基于弹体坐标系的绕质心运动模型,见式(1)。在推导过程中,本文考虑了转动惯量导数项的影响,这是以往三自由度绕质心运动模型不曾考虑的[4]。
式中:、ψ、γ分别为弹

