

大型飞行器的面向对象仿真研究

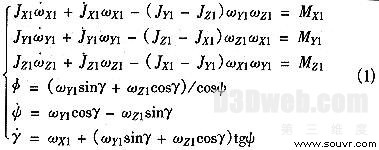
式中:MAX1 MAY1 MAZ1 T MAdX1 MAdY1 MAdZ1 T MX MY MZ T分别是弹体所受的气动力矩分量、气动阻尼力矩分量和干扰力矩分量;MCX1 MCY1 MCZ1 T MTX1 MTY1 MTZ1 T分别是弹体所受的控制力矩分量和弹性振动作用力矩分量。

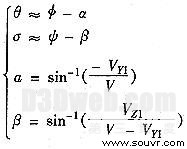
2.2.3 几何关系方程
几何关系方程是联系姿态角、攻角侧滑角、弹道倾角航向角的一组代数方程。其中有7个角变量,只有5个是独立的。根据已计算出的姿态角和攻角侧滑角,由下式可求得弹道倾角航向角θ、σ。
3 飞行器面向对象仿真模型的建立
3.1 面向对象的仿真建模方法
“面向对象”是一个认识论和方法学的基本原则。长期以来,人们一直在设法争取使描述问题的问题空间同解决问题的方法空间在结构上尽可能的一致,这正是面向对象方法学的出发点和所追求的原则[5,6]。
面向对象仿真建模方法与传统的面向过程仿真建模方法相比,具有以下几个方面的优点:
① 面向对象仿真建模所强调的是对象,而不是系统涉及的过程。对象提供的数据抽象和信息隐藏技术帮助开发人员在初步分析阶段对问题模块化,有利于用户识别系统的主要部分,并定义相应的行为和相互关系。通过封装对象内部的特征和方法,对象可以被看成是系统的基本组成,最终得到系统的自然分解。这在仿真建模研究中是极力提倡的。
② 面向对象仿真建模的易理解性。因为面向对象的仿真模型中的对象往往直接表示现实系统中的真实实体,这些实体在面向对象的仿真模型中可以用外观上类似于人们熟悉的实际系统对象的图形或图像来表示,用户可以通过图形或图像界面与仿真模型进行交互,利用图形或图像来直接建立仿真模型,这对于熟悉实际系统的用户来说是很容易理解的。
③ 面向对象仿真建模的可扩充性。由于对象及相应的管理具有一致性和相容性,因此可以在已有模型中加入新的对象。应用函数和算符超载可以给老符号以新的意义。继承的概念允许用户由已有的对象定义新的对象,而仅需描述其不同。可见,使用过的已有模型可以扩充使用。
④ 面向对象仿真建模便于与人工智能结合。在面向对象的仿真模型中,对象封装了它的功能,而功能可以包含智能,因而对象的功能中可以嵌入智能,使对象具有决策和学习能力,进一步达到仿真与人工智能的有机结合。
3.2 飞行器的面向对象仿真模型
根据面向对象的仿真建模方法,本文对飞行器动态飞行控制系统进行了仿真建模研究。在建立仿真模型的过程中,首先对飞行器动态飞行控制系统进行深入研究,根据系统的实际构成和各个单机(或单元)的实际连接关系将整个系统划分为一系列相对独立的对象,并建立各个对象的数学模型;然后依据各个对象的数学模型建立仿真系统的仿真模型库,其中每个对象的仿真模型不仅具有模块性和可重用性,而且具有继承性和可修改性;最后根据仿真实验框架利用已建好的仿真模型库进一步构成飞行器动态飞行控制系统的仿真模型,从而实现了整个系统的面向对象仿真建模。
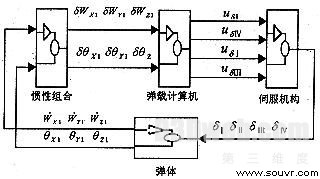
某型号大型飞行器动态飞行控制系统的面向对象仿真模型如图3所示。
模型
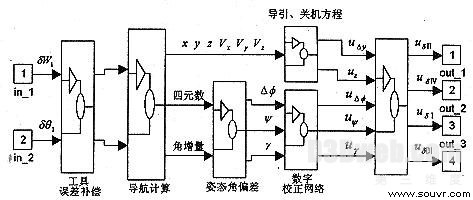
整个仿真系统分为四个一级对象:惯性测量组合、弹载计算机、伺服机构和弹体。 每个对象都是一个相对独立的实体,内部封装了对象的动力学行为,并具有I/O接口,以实现对象间的信息传递。同时,每个一级对象又由若干个二级对象组成。例如,一级对象弹载计算机就由工具误差补偿、导航计算、导引及关机方程、姿态角偏差计算、数字校正网络、信号综合等6个二级对象组成,如图4所示。这样建立起来的飞行器仿真系统,其对象与飞行器动态飞行控制系统中的真实对象一一对应,从而缩小了仿真模型与真实系统的距离,提高了仿真模型的可理解性,可提供较友好的图形用户界面。
4 飞行器仿真实验研究
利用所建立的飞行器仿真模型,对某型号飞行器进行了仿真实验研究。飞行器主动段的飞行程序是:
①点火后发动机开始工作,同时产生推力;
②当推力大于重力时,飞行器离开发射台升空,开始垂直飞行;
③当t=4 s时,开始拐弯,进行程序飞行;
④当t=30 s时,加入法向导引,以减小纵向偏差;
⑤当满足关机方程时,关闭发动机,主动段飞行完成。
在飞行器的主动段飞行过程中,控制的主要任务是:保持姿态稳定并使俯仰角按程序飞行,同时使实际飞行弹道尽可能地接近标准弹道。在俯仰、偏航和滚动三个通道中,控制任务主要集中在俯仰通道。通过对某型号飞行器的仿真实验,得到了飞行器飞行的各种状态变量(位置、速度、姿态角及角速度)的变化曲线。由于篇幅所限,在此仅给出俯仰角及其偏差的变化曲线(如图5所示)。
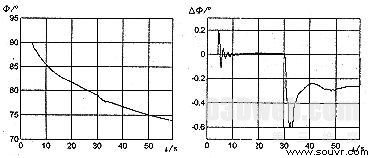
在飞行器的主动段飞行过程中,程序拐弯和加入法向导引是对控制系统最严峻的考验。由图5可以看出:
①在t=4 s程序拐弯时,由于飞行器具有较大的惯性,其俯仰角不会瞬时跟上程序角的变化,而会产生一个滞后偏差,但在控制系统的调节下,经过衰减振荡后,偏差会很快消失,从而控制

