

具有触觉力反馈外科虚拟手术刀设计与实现

作者:付玉锦, 原 魁, 杜清秀, 宋卫国
单位:中科院自动化研究所高创中心
摘要: 本文着眼于培训外科实习医生熟悉并体验使用手术刀进行外科手术的过程,从外科医生做手术时抓持手术刀的实际情况出发,从手术力学分析入手,设计了一种基于手术刀的虚拟外科手术系统。该虚拟外科手术系统专用的仿真手术刀符合外科医生实际操作习惯,具有较好的实用性,其配套软件系统可以提供逼真的三维虚拟场景。在所建立的虚拟手术台上所做的虚拟切割实验表明,该虚拟外科手术系统可以使操作者体验到真实做手术的感觉,完全可用于外科医生的培训当中。
虚拟外科手术是虚拟现实技术在医学领域中的重要应用,也是近年来的研究热点之一[ 1 4 ] 。借助于虚拟外科手术系统,医务人员可以沉浸于计算机生成的虚拟手术环境内,通过仿真手术器械体验和学习如何进行各种手术,并培养应付各种突发情况的能力。医生可以根据自己的需要重复进行各种必要的操作训练,并可以得到根据专家经验建立的专家手术系统的指导,这大大节约了培训医务人员的费用和时间,从而达到迅速提高学习者的手术技能的目的。
在众多的手术器械当中,手术刀无疑是应用最为广泛的一种,它几乎是在外科手术操作过程中,在组织或器官上造成切口的唯一工具,而如何正确使用手术刀进行手术也成为外科实习医生必备的训练课程。本文设计了一个基于手术刀的虚拟外科手术系统,它为训练外科实习医生熟练使用手术刀进行外科手术提供了一个方便快捷的途径。
1. 仿真手术刀设计方案
仿真手术刀的设计主要考虑了设计出的仿真手术刀要在使用方式上与实际的手术刀相一致,使参加训练的医生通过虚拟外科手术系统使用该仿真手术刀时,感觉就如同使用实际的手术刀一样,这样才能更好地达到训练目的。而医生用手术刀在组织或器官上做切口时,通常采用琴弓式或握持式抓持刀柄,如图1所示,这种抓持方式有利于保持刀刃与切开的组织垂直,用力均匀,不偏不斜,一次切开皮肤及筋膜。
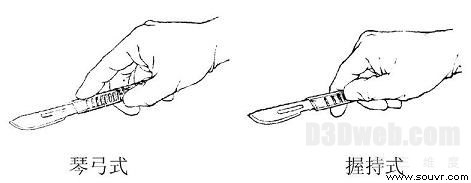
方式
1. 1 手术力学分析
人的一切活动都是由大脑来控制的,医生做手术当然也不例外。医生在做手术时,假设他采用的是琴弓式方式抓持手术刀,那么手指关节将首先感觉到手术刀传来的力,然后手指将这一信息传递给大脑;与此同时,人的眼睛将其感知到的手术刀的位姿信息也传入大脑。大脑将这两方面信息经过判断和融合,然后发送命令进一步控制手臂和手腕动作,这一过程的工作原理可由图2表示。
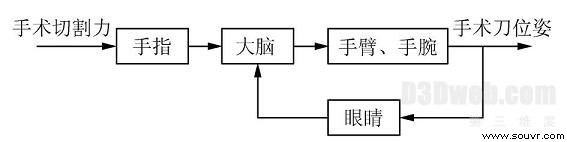
块图
从上面人体机能活动的分析可以看出,医生在做手术时主要依靠两方面的信息进行操作:即人手的触觉信息和人眼睛的视觉信息。在虚拟手术系统中,视觉信息可以通过营造逼真的虚拟场景来获得,触觉信息就要借助于特定的力反馈装置来获得。医生在做手术时,手臂、手腕和手指(尤其是食指)关节上都会有力的感觉,但是手臂、手腕上的力与手指关节上的力是截然不同的。从作用上分,手臂和手腕上的力是主动的,是驱动整个手臂带动手术刀动作的力,它是利用眼睛来收集反馈信息的,由图1也可以看出这一点。而手指关节上的力是被动的,是手术刀传递给手指关节的,是医生触觉感知最直接的力。一名外科医师技能的熟练程度很大程度上就取决于对此力的把握程度上,也即所谓的“手感”,本文下面所要设计的力反馈装置就是要模拟产生这个力。由于作用的不同也决定了这两个力的支点不同,手臂、手腕上的力是以人的肩膀为支点的,而手指关节上的力是以手腕为支点的,这为仿真手术刀本体的设计提供了力学依据。
1. 2 仿真手术刀本体的设计
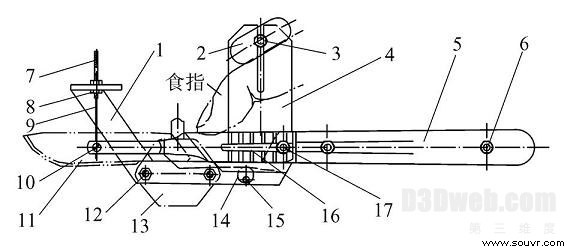
本文所设计的仿真手术刀,是在实际手术刀的基础上经过改造而得来的,这样设计的目的是为了使其尽可能地符合实际操作习惯。将实际手术刀刀柄在中部偏前处截成两段,如图3所示,其后刀柄5用螺钉6与总支架1固定在一起,而前刀柄16通过转轴17与总支架铰接,这样便使得前刀柄能够绕着转轴17做范围10°左右的旋转。牵引钢丝9的一端通过装夹螺钉10与前刀柄相连,当力反馈装置通过牵引钢丝向上拉起前刀柄的时候,操作者的食指就会感受到从手术刀前刀柄上传来的切割力。
构图
1—总支架 2—借力器 3—限位螺钉 4—借力支架 5—手术刀后刀柄
6—总支架与后刀柄固定螺钉(2个) 7—柔性蛇管 8—定位螺帽 9—牵引钢丝
10—装夹螺钉1 1—手术刀片 12—跟踪器用螺钉(2个) 13—三维跟踪器
14—前刀柄复位弹簧 15—弹簧定位螺钉 16—手术刀前刀柄 17—前刀柄旋转轴
由图3不难看出,该仿真手术刀具有结构简单、约束少、活动灵活,抓持上与真实手术刀相同的优点。但同时它也有一定的缺点,由于整个仿真手术刀没有一个固定的支点,因此它只能提供给手指一个反馈力,而对于手臂的反馈力它却无能为力。但由上面手术力学分析可知,手臂上力的感知恰好是通过视觉来收集反馈信息的,这样就可以通过营造逼真的虚拟场景来弥补这一不足。实验表明,在逼真的虚拟环境配合下,该仿真手术刀确实能够提供给操作者一个接近真实的力觉感知。
1. 3 三维跟踪的实现
在虚拟外科

