

具有触觉力反馈外科虚拟手术刀设计与实现

2. 力反馈装置设计方案
2. 1 力反馈装置机构设计
在实际做手术过程中,人手从手术刀刀柄上感觉到的力很小,变化也不大,这就要求仿真手术刀前刀柄16所受到的牵引力变化连续、无冲击、实时性能好,为此本文设计了步进电机- 丝杠传动机构的驱动方式来拖动牵引钢丝9。步进电机具有控制简单、灵活,在额定载荷范围内启动和制动均平稳、迅速的优点,丝杠传动机构则进一步降低了振动,同时可提高直线运动精度。图4所示为步进电机驱动机构的实物图。
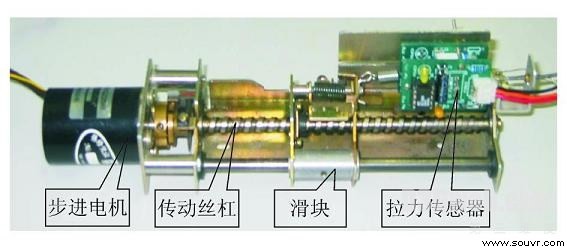
机构
力反馈装置的工作流程是:系统根据切割力模型[ 5 ]输出反馈力信号给步进电机,步进电机将带动传动丝杠旋转,传动丝杠再带动滑块向左移动,滑块上绑定有牵引钢丝9。显然,当滑块向左移动时,牵引钢丝就会对前刀柄16产生向上的拉力使其抬起,进而将拉力传递给触压在前刀柄上的食指上,这样就会使操作者有一种如同真实做手术的感觉。
2. 2 力反馈控制模型
针对上面所设计的力反馈装置,可采用两种力反馈控制策略。一种是基于位置的开环控制策略。这种控制策略依据的是刀尖抬起的高度与食指感受到的切割力成正比这一特点。它的优点是模型直观,控制简单,但控制精度难于保证。另一种是基于反馈力的闭环控制策略。这种控制策略模型相对复杂,而且需要添加拉力传感器(参见图4) ,但由于直接利用反馈力作为控制量,所以控制精度较高。由于手术操作是非常精细的工作,在手术过程中医生的“手感”(即力觉反馈)非常重要,稍有不慎就有可能造成医疗事故。因此,为了能使虚拟外科手术系统更加真实地模拟实际手术过程,也要求仿真手术器械的力觉反馈装置具有较高的精度。为此选用基于反馈力的闭环控制策略对力反馈进行控制,它的控制模型如图5所示。
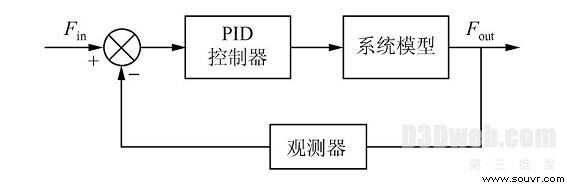
模型
3. 配套软件系统的设计
3. 1 系统的组成
虚拟外科手术系统配套软件的组成原理如图6所示,它不仅要完成虚拟场景绘制的任务,而且还要完成仿真手术刀力反馈装置的控制任务。其控制实现流程如下:三维跟踪装置将检测到的仿真手术刀位姿信息传递给系统,一方面,系统利用这些信息对虚拟手术刀和虚拟人体组织进行碰撞检测和变形处理,最后把它们在三维场景中实时绘制出来;另一方面,系统将这些信息传递给切割力模型,由模型判断实际所需反馈力的大小,再将其连同力反馈装置所采集到的反馈力信息一同传递给PID 控制器,由P ID控制器发送指令给力反馈装置,决定下一时刻反馈力的大小。

理图
3. 2 三维虚拟场景的搭建
作为一个完整的虚拟现实系统,光有仿真手术刀及配套

