

基于计算机视觉的虚实场景合成方法(增强虚拟现实)研究与应用

模板中与规则化图像具有最大相关系数 p且 p>0.5的模板作为当前匹配结果,并返回与之对应的 ID值
2.2摄像机位置、姿态估计
首先给出系统的坐标变换关系如图 3所示。规定平面标识在世界坐标系中的位置为已知,摄像机位置、姿态计算问题转化为摄像机系与世界坐标系之间三维变换矩阵的求解。
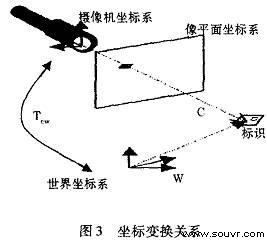
世界坐标系与摄像机坐标系间的变换关系可以用式(5)表示。其中 W为世界坐标系下某点坐标,C为该点在摄像机坐标系中的位置,T :[R R R:T] 为待求三维变换矩阵,包含三个旋转分量和一个平移分量。
C=T W (5)
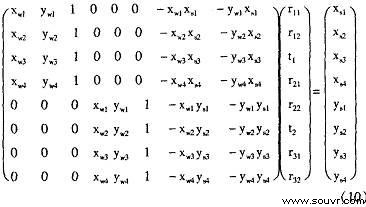
由于规定平面标识与世界坐标系下的Z:0平面重合,则由式 (5)可得,平面标识上的某点在世界坐标系下的坐标 Wi=(X ,Y wi,0,1) 与其在摄像机坐标系下坐标 C;:(X Y z i,1) 之间的关系可以表示为式(6)。

有 8个待定系数,由标识的四个角点可得如下方程组,则完全可以求取以上 8个未知数。
上一篇:建模与虚拟现实仿真资源库系统的初探[ 10-11 ]
下一篇:分布式仿真在电子对抗中的应用[ 10-11 ]

