


水下无源导航系统仿真匹配算法研究

来源:第三维度
作者:张飞舟,、侣文芳, 晏 磊, 葛远声
摘要:针对水下无源导航(地形辅助导航) 系统的特点,充分利用各种海洋地理特征传感器获取信息,进行数据预处理、算法分析、性能评估,然后进行智能数据融合,进而完成水下无源导航系统模块化的仿真设计,为水下无源导航系统的进一步研究提供可行的方法和技术。仿真结果表明,采用水下地形匹配辅助导航,能够有效地修正惯导误差达到设计要求,为真实海洋环境下的精确导航提供可靠的技术依据。
未来水下导航的基本要求是水下运动载体AUV (autonomous underwater vehicle) 在不接收外界导航信息的条件下,能够长时间地连续水下高速航行,这就对导航的自主性和无源性提出了极高的要求[1 ] 。随着微电子技术的发展, 近年来AUV 的导航出现了一种以惯性导航( INS) 为主要导航信息源辅以其他导航(地形匹配导航) ,并可长时间地提供精确导航能力,修正惯性导航误差,而不需要定期浮出海洋洋面或进行有源发射来获取位置和速度信息的无源导航技术。本文采用信息融合技术,以数字海图和海洋地理特征传感器作为辅助手段,进行水下地形辅助导航系统仿真设计, 从而获得较高的定位精度, 以满足AUV 对导航系统“水下、长期、高精度、全天候”的要求。
1、水下无源导航基本原理
随着海洋地理特征传感器测量技术的发展,进行水下地形匹配技术研究已成为可能。采用地形匹配技术进行辅助导航,AUV 就无需露出水面进行惯导修正, 因此, 利用地形匹配辅助导航TAN ( terrain-aided navigation) 来提高AUV 的INS 的导航精度是行之有效的技术途径之一。基于地形匹配的水下无源导航技术是为了解决AUV 的INS 修正而提出的一种新的导航技术方案。该方案的设计指导思想是将地形匹配技术应用于AUV 的导航系统中,借助海底地理特征信息实时对AUV 的INS 进行校准,以克服INS 误差随时间积累这一固有缺陷,从而保证实时地向AUV 提供精确的导航信息[2 ] 。
AUV 地形匹配辅助导航基本原理框图如图1 所示。
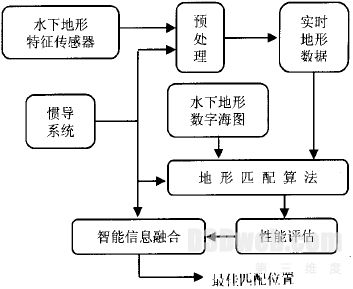
图1、AUV 地形匹配导航基本原理框图
Fig. 1、Principle of TAN for AUV
从图1 可知,水下无源导航就是通过水下地形特征传感器测量出AUV 经过海底的地形特征,推算导航设备估算出地形特征的位置,数据处理装置以这个估算位置为基础,在数字海图存储装置中搜索出与测得的地形特征有最佳拟合的地形特征。该海洋地形特征在数字地形海图中所处的位置便是对AUV位置的最佳匹配点,利用最佳匹配位置对推算导航设备进行修正[3 ,4 ] 。如此不断循环,便可提高推算导航设备的精度,从而获得精确的导航信息。
2、系统仿真匹配算法流程
海底地形匹配解算方法对于长期水下航行的AUV 而言,必须设法抑制INS 的漂移误差,采用最优位置估算法对INS 进行闭环校正,以提高系统精度。为了解决增大搜索范围与减轻计算负担之间的矛盾,采用变结构的并行Kalman 滤波器阵或联邦滤波器阵的布局。系统仿真算法流程见图2[5 ,6 ] 。为了提高防止虚假定位的能力,在匹配解算中采用M/ N 决策。若要增强AUV 仿真系统的真实性,首先必须选择符合海底地理特征的AUV 的航迹,优化的航迹数据被分别送到地理特征(输出仿真) 模块和INS(输出仿真) 模块,以便产生所需的海底地理特征数据和INS 的输出数据。利用专用地理信息系统软件完成海底地形特征参数计算和地形筛选,并把得到的海底地理特征输出数据、INS 输出数据一起送至并行Kalman滤波器(或联邦滤波器) ,经过滤波处理后,得到位置状态的最优估计。
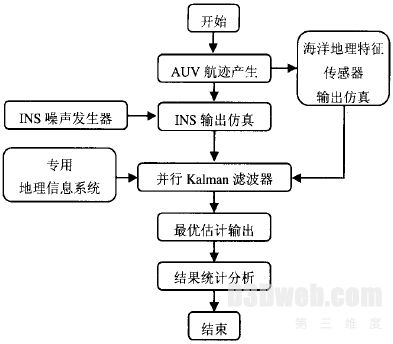
图2、AUV 地形匹配算法系统仿真流程图
Fig. 2、Flow Chart of Terrain MatchingSimulation for AUV
3、匹配算法的搜索模式
3. 1、搜索滤波器结构
并行Kalman 滤波器的基本结构由一个并行滤波阵列组成。此阵列的规模为41 ×41 ,阵列中子滤波器的间隔由地图的分辨率决定[7 ] 。目前仿真中所使用的地图分辨率为0. 25′×0. 25′,因而每两个子滤波器之间的距离约为400m ,整个滤波阵列覆盖了约9. 3 ×9. 3km2 的区域。搜索模式用一组单态Kalman 滤波器,其状态量和观测量均为观测系统的高度误差δh[7 ,8 ] 。
3. 2、平滑加权残差平方(SWRS)
考察每个子滤波器搜索模式时,平滑加权残差平方SWRS(smooth weight remain square) 被用来作为高度修正后匹配程度的指标。SWRS 越小,则该子滤波器匹配程度越好。
残差为:

归一化残差平方为:

平滑加权残差平方为:

式中,α为加权因子。从上式可以看出,SWRS 考察了过去所有时刻点滤波器状态的总体情况,并且对距当前更近时刻的残差值加以较大的权系数。
3. 3、搜索模式定位准则
在每个搜索时刻,具有SWRS 最小值的子滤波器认为是该时刻的最佳滤波器。但由于种种原因,最佳滤波器不一定是最靠近载体真实位置的“正确滤波器”,而这里寻求的恰恰是“正确滤波器”。由INS 连续漂移的特性,可以知道正确滤波器在一段时间内应固定在某一子滤波器或仅在位置相邻的子滤波器间变化,而不应有大的跳变。
因此定位准则中除了要考察匹配优势以外,还要根据正确滤波器的连续稳定性来考察最佳匹配滤波是否就是正确滤波器。本文对于起伏较大的地形和平坦地形设计了不同的定位准则。
准则1

准则2

式中, SWRSMIn 为所有滤波器中的最小值,SWRS3min为次小值; H1 、n1 、H2 、n2 均为阈值,参考值分别为0. 35 、10 、0. 08 、25 ; N 为计数器,记录了最佳匹配滤波器在连续测量更新过程中稳定于某一子滤波器或相邻子滤波器的实际次数。这两个准则都要求当某个子滤波器连续一段时间具有稳定的匹配优势后才进行定位。
其中准则1 能迅速产生正确滤波器判定,适用于起伏较大的地形;准则2 要靠连续稳定计数器N 来完成正确滤波器的判别,适用于地形比较平坦的区域。
3. 4、位置计算
估计计算位置时, 以搜索得到的正确滤波器为中心,包括其相邻子滤波器的3 ×3 方块分布的9 个子滤波器的SWRS 值来计算位置的估值, 这样可以获得比直接使用正确滤波器位置更好的统计精度。这种方法的思想是:该子滤波器组中的任一个可能是正确位置的概率Pi ( i = 1 , 2 , ⋯, 9)与各自的SWRS 值有如下关系:

其中,

最后的输出为:

4、匹配算法的跟踪模式
4. 1、跟踪滤波器结构
跟踪滤波器采用5 维状态,即

离散系统方程和量测方程分别为:

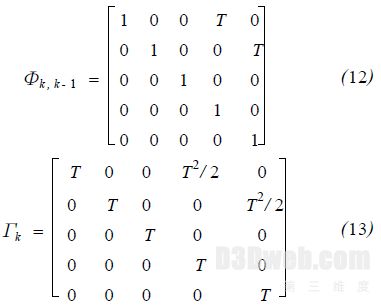
式中,ωk 和γk 分别是系统噪声和量测噪声,它们都是零均值白噪声信号; 系统状态转移矩阵Φk , k - 1和噪声传递矩阵Γk 分别为:
量测阵为:

4. 2、可观性分析
系统可观性矩阵为:
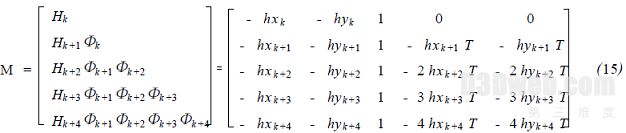
系统可观测条件是可观性矩阵满秩, 因而可以看出, hx 与hy 要求随时间变化。
对于AUV 载体来说,运动速度比较慢,而当地图分辨率不是很高的情况下,如果连续两次采样,载体还没有航行驶出同一个地图格网,则有可能由于不可观而滤波发散。这里采取的措施是增大滤波周期,如5s 一次滤波。
4. 3、状态输出
将计算出的滤波器状态

补偿到惯导输出中,作为最终的估计结果。
5、匹配算法的搜索-跟踪转换逻辑
5. 1、搜索模式正常结束条件
当满足准则式(4) 或式(5) ,认为搜索模式成功,于是正常退出,转入到跟踪模式。
5. 2、搜索模式重置条件
1) 考察SWRSmax 与SWRSMIn 的差异, 如果SWRSmax - SWRSMIn连续N1 次小于某个阈值,则认为该最佳滤波器不具有很高的优越性。
2) 考察SWRSMIn的值,如果连续N2 次大于某个阈值,则认为滤波没有收敛。搜索模式丢失条件。当SWRSMIn连续N1 次大于某个阈值,则认为真实位置已不在搜索区域范围内,退出搜索。
跟踪模式退出条件。在跟踪模式下,判断如果已经滤波一段时间,而且位置的方差值仍然大于某个阈值,则认为跟踪滤波失败,退出,重新转入搜索模式。
在这两种情况下,重置Kalman 滤波器阵中的每个子滤波器的状态,重新进行搜索。
6、仿真试验
1) 给定水下测量数据为某块5. 5°×5. 5°,经度方向有1 320 点,纬度方向有1 200 点,一共有1 584 000 个测量点;测量间距约为500m ,最大水深为- 8 049. 23m ,最大高度为3 799. 54m ,包括有深海水域、浅海水域和岛屿。
2) 惯性初始条件。惯性初始位置经纬度误差均为2 000m ,陀螺漂移误差为0. 06°/ h ,加速度零偏为10 - 6 g/ h ,点划线是INS ,实线是匹配效果。在上述理论分析以及匹配算法设计的基础上,对海底地形辅助导航系统进行计算机仿真研究。图3 与图4 分别是位置误差曲线和速度误差曲线仿真结果。仿真结果表明,采用水下地形匹配辅助导航,能够有效地修正惯导误差,为真实海洋环境下的精确导航提供可靠的技术依据。

图3、位置误差仿真结果曲线
Fig. 3、Simulation Results of Location Error
无源导航是为实现AUV 水下长期自主高精度导航而发展的新型导航技术。本文借助海洋地理特征传感器获取各种数据,采用数据融合技术进行水下无源导航系统模块化系统仿真,为进一步研究水下无源导航提供技术基础。试验结果表明了这种方法的有效性,具有良好的应用价值。
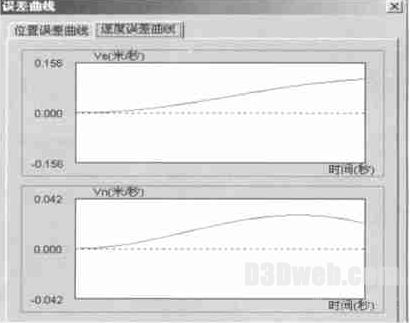
图4、速度误差仿真结果曲线
Fig. 4、Simulation Results of Velocity Error
参 考 文 献
1、武凤德. 水下导航技术最新发展. 舰船导航,2001 (6) :1~8 ;29
2、刘光军,袁书明,黄咏梅. 海底地形匹配技术研究. 中国惯性学报,1999 (1) :19~22
3、刘光军,陈 晶. 海底地形辅助导航系统仿真技术研究. 计算机仿真,2000 ,17 (2) :21~24
4、王英钧. 地形辅助导航综述. 航空电子技术,1998 (1) :24~29
5、Rich H ,Mendelsohn L ,Aarons R ,et al. Next GenerationMarine Precision Navigation System. Positon Locationand Navigation Symposium , IEEE 2000 ,2002. 200~206
6、Strauss O ,Comby F ,Aldon M J . Multibeam Sonar ImageMatching for Terrain- based Underwater Navigation. O2cean’99 MTS/ IEEE. Conference of Riding the Crest intothe 21st Century ,1999
7、Sistiage M ,Opderbeck J . Map Based Underwater Naviga2tion Using a Multibeam Echosounder. Ocean’98 Confer2ence ,1998
8、Lucido L ,Opderbeck J . A Terrain Reference UnderwaterPositioning Using Sonar Bathymetric Profile and Multi2scale Analysesn. Ocean’96 MTS/ IEEE Conference ofProspects for the 21st Century ,1996
第一作者简介:
张飞舟,博士,博士后。现主要研究方向是智能控制、定位导航、智能交通系统以及3S 工程应用。代表成果:智能交通系统中的运营车辆优化调度研究;智能交通系统中的公交车辆动态调度;基于云模型的车辆定位导航系统模糊评测。已发表论文40 余篇。

