


SolidWorks机构运动仿真应用实例

来源:第三维度
作者:韩锐(硕士学位论文)
《 基于SolidWorks的机构运动仿真研究》第六章
6 机构运动仿真应用实例
本文中的机构运动仿真可分为两类:一类是简单机构的运动仿真,包括齿轮齿条机构、槽轮机构、曲柄滑块机构、导杆机构和凸轮机构。另一类是组合机构,是由不同的简单机构搭建组合而成的机构。下面分别介绍两类机构的仿真实例。
6.1 简单机构的运动仿真
6.1.1 齿轮机构
齿轮机构进行运动仿真的图像如图 6-1 所示:小齿轮为28 齿,大齿轮的齿数为42,齿轮和齿条的模数都为2。小齿轮的运动参数曲线如图6-2 所示,小齿轮的转速为1rad/s。图上可见角加速度曲线有一定震荡,但数量级为10−12,分析可能是由于求解时最后一位的舍入误差所致。

图6-1 齿轮机构
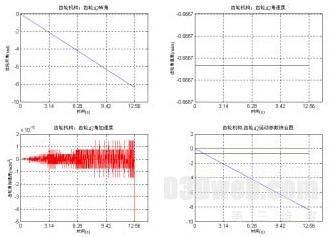
图6-2 大齿轮运动曲线图
6.1.2 槽轮机构
槽轮机构装配后的屏幕图像如图 6-3 所示,运动仿真时,其中的销轮作为主动件,以1rad/s 的角速度匀速转动。槽轮为从动件,销轮刚开始运动时销轮静止不动,当销轮的圆销进入槽后带动销轮一起运动。

图6-3 槽轮机构
图6-4、6-5 表示了槽轮在不同的销轮 转动方向和不同的销轮转动速度下的运动参数曲线。由图中可以看出槽轮开始运动时,相对角加速度从0 跳变到1,说明槽轮开始运动时是有冲击的。对比图6-4、6-5,可见在不同的销轮转速下,槽轮的相对速度和加速度曲线不变,这是由于该曲线是由槽轮速度比销轮速度得到的,加速度也是相比得到的,槽轮的计算方法较特殊。
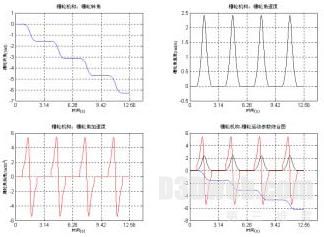
图6-4 销轮转速1rad/s,槽轮运动曲线
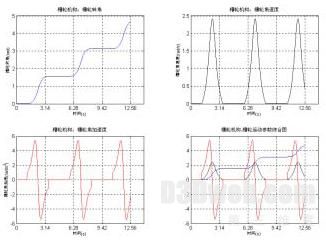
图6-5 销轮转速-0.666rad/s,槽轮的运动曲线
6.1.3 曲柄滑块机构
曲柄滑块机构首先要设置参数,如图 6-6 所示,点击“安装”按钮后,系统会根据用户输入的数据生成三维模型并装配,运动仿真中的曲柄滑块机构如图6-7 所示。当曲柄为主动件,以1rad/s 匀角速度转动时,图6-8、6-9 表示了曲柄滑块机构中的连杆在不同曲柄长度条件下的运动参数曲线,图6-10、6-11 表示了曲柄滑块机构中的滑块在不同曲柄长度条件下的运动参数曲线。
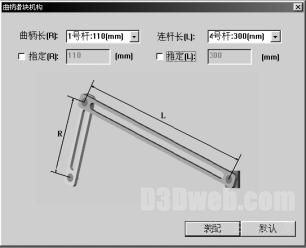
图6-6 曲柄滑块机构设置对话框

图6-7 曲柄滑块机构
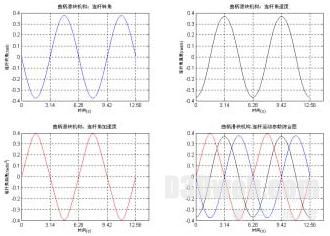
图6-8 曲柄长度110mm-连杆长度300mm, 连杆运动参数曲线
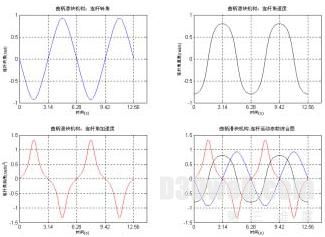
图6-9 曲柄长度240mm-连杆长度300mm, 连杆运动参数曲线
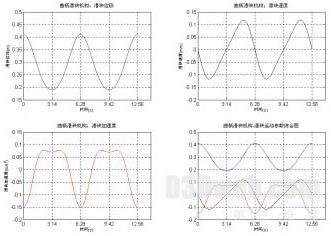
图6-10 曲柄长度110mm-连杆长度300mm, 滑块运动参数曲线
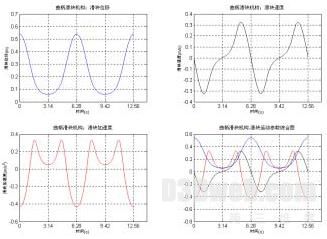
图6-11 曲柄长度240mm-连杆长度300mm, 滑块运动参数曲线
由图6-8、6-9 可以看到,当连杆与曲柄成一条直线时,连杆的角速度出现最大值,角加速度出现最小值。在连杆长度不变,曲柄长度增加的情况下,连杆的转角(即连杆与水平方向的夹角)最大值随之增加,角速度和角加速度也有不同程度的增加,其中角加速度的增加幅度大于角速度的增加幅度。由图6-10、6-11 可以看到,当连杆与曲柄成一条直线时,滑块处于极限位置,速度为零。在连杆长度不变,曲柄长度增加的情况下,滑块的位移、速度和加速度也有明显的增加。当曲柄长度与连杆程度接近时,滑块的加速度曲线呈现出明显的双峰形态。
6.1.4 导杆机构
导杆机构首先要设置结构参数,如图 6-12 所示,点击“装配”按钮后,系统会根据用户输入的数据生成三维模型并装配,如图6-13 所示。
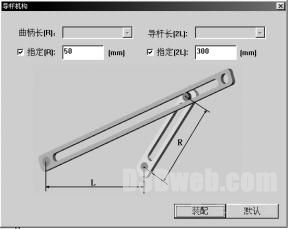
图6-12 导杆机构设置对话框

图6-13 导杆机构
输入的导杆长特指两倍的机架长度L,图6-14、6-15 表示摆动导杆机构中的导杆在不同曲柄长度条件下的运动参数曲线。
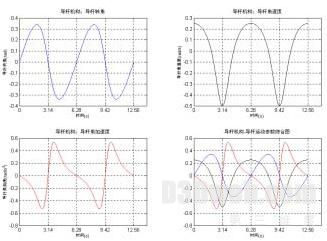
图6-14 曲柄长度50mm-机架长度150mm,导杆运动曲线
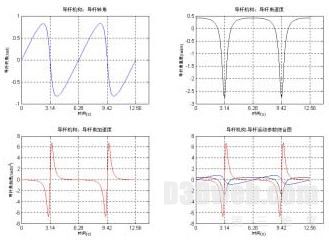
图6-15 曲柄长度110 mm -机架长度150mm,导杆运动曲线
由图6-14、6-15 可见,当曲柄以1rad/s 等角速度转动时,导杆有急回运动特性,且导杆角速度的曲线是对称变化的。曲柄转过半周与导杆重合时,导杆角速度达到最大值,当曲柄转过半周再次与导杆重合时,导杆的角速度又达到最大值。在机架长度不变,曲柄长度增加的情况下,对比两图,设机架长度L 与曲柄长度R 之比为λ ,图6-14 中λ = 3,图6-15 中λ =1.36。λ 值愈小,空回行程的角速度变化愈剧烈,角速度和角加速度最大值也变得很大,反之则变化平缓。当λ 值减小时,导杆的摆角随着之增加,角速度变化剧烈,故一般推荐λ >2。
6.1.5 凸轮机构
凸轮机构装配后的屏幕图像如图 6-16 所示,运动仿真时,其中的凸轮作为主动件,以1rad/s 的角速度匀速转动,尖顶推杆为从动件。凸轮转动推动推杆在竖直方向作往复运动。由图6-17、6-18 可以看到,本文中偏心椭圆凸轮机构的推杆位移曲线是对称变化的,速度曲线不是简单的线性变化,当推杆运动到极限位置时,速度为零,加速度不为零。加速度呈现出明显的双峰形态,说明偏心椭圆的动态特性不稳定。
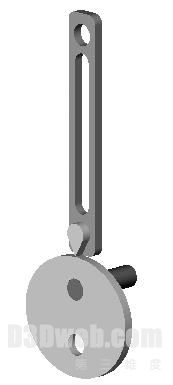
图6-16 凸轮机构
图6-17、6-18 表示了凸轮机构中的推杆在不同凸轮转速条件下的运动参数曲线。对比两图,凸轮的转速减小时,推杆的速度和加速度也随之减小,但曲线的基本形状保持不变,在极限位置的加速度曲线还是具有双峰形态。
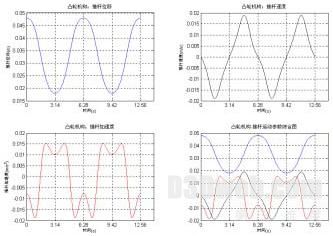
图6-17 凸轮转速1rad/s
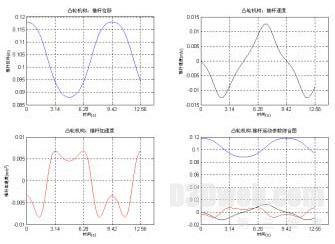
图6-18 凸轮转速0.666rad/s
6.2 组合机构的运动仿真
6.2.1 槽轮-曲柄滑块组合机构
首先添加槽轮机构,点击工具条上的“槽”按钮。待槽轮安装完毕后,再点击“滑”按钮,出现曲柄滑块机构设置对话框,设置曲柄长度为100mm,连杆长度为275mm,如图6-19 所示。
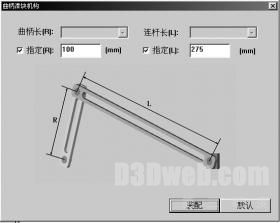
图6-19 曲柄滑块机构设置对话框

图6-20 槽轮-曲柄滑块组合机构
曲柄滑块机构安装后的组合机构仿真情况如图6-20 所示。当主动件销轮以1rad/s 匀速转动时,组合机构中的槽轮(即曲柄)运动曲线如图6-21 所示,连杆运动曲线如图6-22 所示,滑块运动曲线如图6-23 所示:
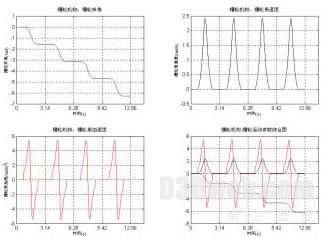
图6-21 槽轮运动曲线图
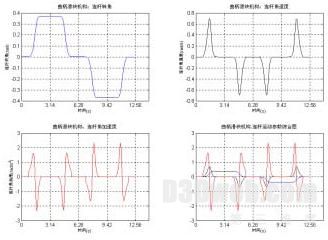
图6-22 连杆运动曲线图
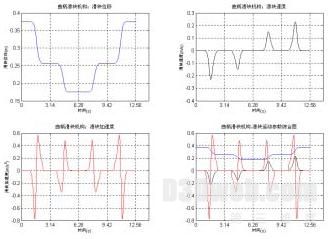
图6-23 滑块运动曲线图
三维实体机构的运动仿真后,要进一步分析零件的运动参数,用户可以打开后台的数据库,运动曲线就是根据数据库中的数据绘制的,用户可以利用数据表中的数据作进一步的分析研究。打开的连杆数据表如图6-24 所示:
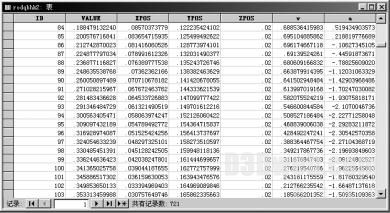
图6-24 连杆数据表
6.2.2 齿条-齿轮-槽轮-导杆组合机构
依先后顺序按下工具条上的按钮“齿”、“槽”、“导”就会组成如图6-25的组合机构。其中导杆机构的曲柄长度为105mm,机架长度为137.5mm,小齿轮的转速为1rad/s。
图中的各个构件按简单机构的装配关系进行装配,不同机构之间在空间上处于不同平面上,后面装配的机构会在Z 方向上处于较高的平面上,因此组合机构在运动时不会产生构件碰撞现象。组合机构中的大齿轮曲线图如图6-26 所示,槽轮(即曲柄)曲线图如图6-27 所示,导杆的曲线如图6-28 所示:
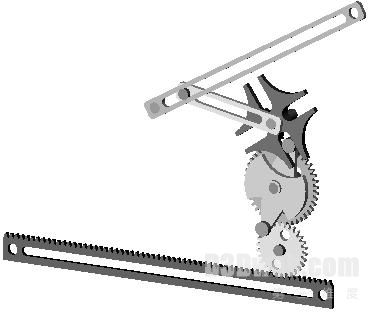
图6-25 齿条-齿轮-槽轮-导杆组合机构
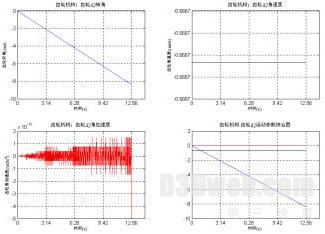
图6-26 大齿轮曲线图
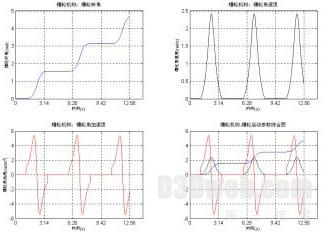
图6-27 槽轮曲线图
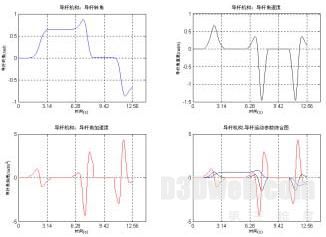
图6-28 导杆运动曲线图
由图6-26 可以看到,大齿轮的角加速度在零附近存在一定波动,但数量级为10−12,经分析认为是计算角速度时存在一定舍入误差,又经微分放大所致。由图6-28 可以看到,原本连续运动的导杆变为了间歇运动,这是由于导杆前端的槽轮是间歇运动的。如果需要进一步查看导杆的运动数据,可以打开数据表roddg2,其中记录导杆的详细运动数据,如图6-29 所示:
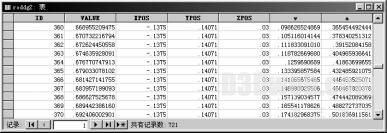
图6-29 导杆数据表

