


飞行模拟器操纵系统动态特性要求

来源:第三维度
中国民用航空总局《飞行模拟设备的鉴定和使用规则》(CCAR-60)已经2005年2月5日中国民用航空总局局务会议通过,现予公布,自2005年9月1日起施行。
附录A 飞机飞行模拟机鉴定性能标准
附件2 飞机飞行模拟机客观测试
第60.A.2.5条 操纵系统动态特性
(a)飞机飞行操纵系统特性对其操纵品质有着重要的影响。在驾驶员对飞机的可接受性方面,一个需要考虑的重要因素就是通过驾驶舱的操纵装置提供给驾驶员的“感觉”。为了交付一个能使驾驶员感觉舒适的系统并使其认为这是一架适合飞行的飞机,人们在飞机感觉系统设计上付出了巨大努力。为了使模拟机能代表相应飞机,应当给驾驶员提供正确的感觉,即在相应飞机上的感觉。确定模拟机是否符合这种要求,取决于飞机操纵感觉系统的动态特性是否复现了所模拟的飞机。复现的效果将通过在起飞、巡航和着陆构型下对模拟机操纵感觉系统动态特性的记录结果与飞机的测量结果进行比较来确定。
(b)记录诸如对脉冲或阶跃函数的自由响应是评估机电系统动态特性的传统方法。但无论如何,由于只能对真实的输入和响应进行评估,所以评估动态特性只是一种可能性。由于模拟机操纵载荷系统与飞机系统的紧密吻合是至关重要的,因此应当尽可能收集最好的数据。本附件描述了要求的操纵感觉系统动态特性测试。这些测试通常是在使用脉冲或阶跃输入对系统进行激励后,通过测量操纵装置的自由响应来完成的。这个测试应当在起飞、巡航和着陆飞行条件及构型下完成。
(c)对于带有不可逆操纵系统的飞机,如果可以提供适当的静压输入以代表飞行中所遇到的典型空速,便可以在地面进行测量。同样还可以证明,对于某些飞机,在起飞、巡航和着陆的不同构型下会表现出相似的效果。因此,对一种构型进行的测试可以满足另一种构型测试的需要。如果按上述一种或两种情况安排测试时,应当提交工程证明或飞机制造厂家的原理说明,作为采用地面测试或减少某一种构型测试的合理性依据。
(1)操纵系统动态特性的评定。
操纵系统的动态特性常用频率、阻尼和操纵系统中出现的其他传统测量术语来表示。为了对模拟机操纵载荷的测试结果建立一致的验证方法,应当明确定义测量参数和所用容差的标准。对于欠阻尼系统和过阻尼系统(包括临界阻尼情况)都应当建立标准。对于一个阻尼很小的欠阻尼系统,可以用频率和阻尼对其进行定量表示。而对于临界阻尼或过阻尼系统,则很难从其响应时间历程中测量出频率和阻尼。因此,应当采用其他测量方法。
(2)对于C级和D级模拟机。
验证操纵感觉系统的动态特性是否能代表所模拟飞机的测试应当表明动态阻尼周期(操纵的自由响应)与飞机的动态阻尼周期相比较是否在规定的容差范围内。对于欠阻尼和临界阻尼,可接受的评定系统响应和所采用容差的方法见本条(d)款。
(d)容差。
(1)欠阻尼响应。
(i)在这种阻尼响应中需要测两个量:第一次交零的时间(在阻尼比限制的情况下)和随后的振荡频率。如果响应上存在周期不一致的情况,需要以单个周期为基础进行测量。然后将每个周期与飞机操纵系统的相应周期单独作比较,并且结果应当满足为该周期所规定的整个容差;
(ii)阻尼的容差应当应用到单个超调量上。由于小超调量的意义可能是有问题的,所以对小超调量采用容差限制方法评定时应当特别慎重。只有那些超过总初始位移5%的超调量才被认为有意义。在本附件图1中,标注为T(Ad)的误差带是指在初始位移振幅Ad的±5%范围内偏离稳定状态振荡的一个区域。误差带内的振荡可以忽略不计。将模拟机数据与飞机数据进行比较时,应当先把模拟机和飞机的稳定状态值重叠或对齐,然后再比较振荡峰值的幅度、第一次交零时间和单个振荡周期。在对比飞机数据的那一时间段内,模拟机应当有与飞机相同次数的有意义超调。这种响应的评定过程如本附件图1所示。

(2)临界阻尼和过阻尼响应。
由于临界阻尼响应的特性(无超调),达到稳定状态(中立点)值90%处的时间应当与飞机数据一样,误差不超过±10%。模拟机响应也应当是临界阻尼响应。其过程如本附件图2所示。
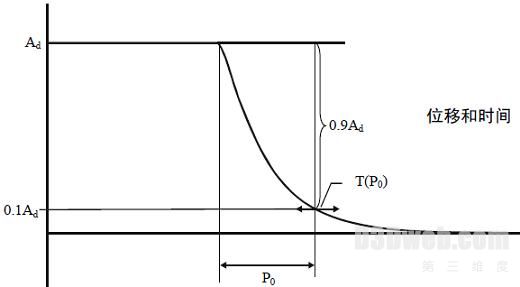
图2 临界阻尼阶跃响应
(3)下面归纳了在供参考的测量方法图示中所使用的容差T:
T(P0) ±10% P0
T(P1) ±20% P1
T(A) ±10% A1,±20%的后续峰值
T(Ad) ±5% Ad=误差带
超调次数 ±1
如果在误差带之外完成的有意义的周期数超过本附件图1所示的周期数,将使用下列容差(T):
T(Pn) ±10(n+1)% Pn ,“n”是下一个周期的序号。
(e)操纵系统动态特性评定的替代方法。
(1)对于有液压传动操纵装置和人工感觉系统的飞机,可以采用替代方法来测量操纵系统的动态特性。不使用自由响应测试方法,而是通过测量操纵力和移动速率的方法来验证。
(2)对于俯仰、滚转和偏航每一个轴,都应按下列不同的速率,用力将操纵装置移到最大极限位置。这些测试应当在典型的滑行、起飞、巡航和着陆条件下进行。
(i)静态测试,缓慢地移动操纵装置,以大约100秒的时间完成全行程操纵。全行程操纵定义为从中立位置移动到止动点,通常为后止动点或右止动点,随后再通过中立位置移到相反的止动点,最后回到中立位置;
(ii)慢速动态测试,以大约10秒的时间完成全行程操纵;
(iii)快速动态测试,以大约4秒的时间完成全行程操纵。
注意:作动态测试,操纵力不应超过44.5daN(100磅)。
(f)容差。
(1)对于静态测试,参见本附件的第60.A.2.3条模拟机客观测试标准中第2条(a)(1)、(2)和(3)款中规定的容差。
(2)对于动态测试,为±0.89daN(2磅)或高于静态测试的操纵力增量的±10%。
(g)运营人可以采用类似于上面介绍的替代方法。这类替代方法应当经证明是有效并适用的。例如,上面提到的替代方法可能就不适合所有制造厂家的系统,并且对带可逆操纵系统的飞机肯定不适用。因此对每种情况都应在特定的基础上分析替代方法的优缺点。如果模拟机鉴定人员发现该替代方法不能得到令人满意的模拟机性能测试结果,那就应当采用更普遍接受的测试方法。

