

分布式虚拟现实仿真中视景数据库构造

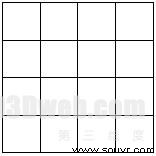
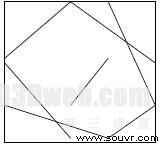
a 均匀采样间隔表示 b 三角形不规则风格表示
图2 常用的地形建模表示结构
2) 三角形不规则网格( TIN TriangulatedIrregular Network)采用三角形不规则网格来表示地形( 如图2b) , 在地形平坦的区域, 多边形较少, 而在地形复杂的区域, 多边形较多。 这样用较少的多边形便可保持基本的地形地貌, 从而大大提高了图形绘制的性能。
TIN 表示的不足是由于其不规则性, 需要存储较多的拓扑关系。 虽然其多边形大大减少了, 但存储容量并未减少。 同时TIN 的表示还要占用较多的预处理时间, 生成不同的LOD 层次。 当然这一切都是为了保证系统的实时交互性能。
2.2 特征物与地形的匹配
特征物与地形的匹配首先要建立特征物的模型, 然后将其与地形进行整合。
1) 特征物模型的建立。 每种特征物模型的建立以及与地形的整合都有各自的约束条件。 比如交通网络一般表示成一定宽度的段的结合, 但在道路的交叉路口比较复杂, 尤其是不同宽度的道路的交叉和立交桥。 还有诸如河流的堤岸的生成,河流与道路交叉处桥梁的生成等等。
2) 特征物与地形匹配。 CMU 在这方面做了大量的研究工作[ 1] , 取得了一些成果。 由于匹配涉及到复杂的数据结构与算法, 而且不同特征物的要求不同, 还需要必要的人工干预, 因此目前仍只实现了某些文化特征物的匹配。
特征物与地形匹配有下面的一些策略:首先生成地形表面, 然后将地面文化特征物贴在地表上, 这一方法是最简单的。 它的缺陷在于生成的视景在同一个z 值上可能有多个面, 从而出现显示时% 争夺z 值&( zfight ing) 的现象。 而且生成的视景有时与实际情况不符, 如在陡峭的山上有路, 如果直接将% 路&贴在地形上, 那么路的坡度与实际的坡度将不符。 这样计算机自动生成兵力在进行爬坡时可能就无法上去。 MutiGen 早期版本在匹配方面即采用这一方法;
首先生成地形的TIN 网格, 然后逐渐加入特征物, 与地形整合在一起( 即在同一z 值上只有一个面) 。 这种方法的优点是可以不断地加入特征物, 缺点是随着特征物的增加, TIN 会越来越复杂。 CMU 采用了这种策略;
先生成特征物的3D 模型, 然后再选取地形上的其他点来生成整合的TIN( integrated TIN) 。这一方法在同等条件下生成的多边形较方法II少。 而最终效果与方法II 一样, 只是动态加入特征物要完全重构那些受影响的地形块。 3 种方法比较, 这一方法生成的视景最符合实际情况。 在Mult iGen 的改进版本中, 已开始采用这一方法。
2.3 多种细节层次的视景表示
在视景生成中, 为了降低图形系统的负载, 提高仿真的实时性, 提出了多种细节层次LOD 的表示, 亦称为多精度( Multiresolution) 的表示。 即在距离视点较近时, 对物体用较多的多边形来描述; 较远时, 用较少的多边形来描述。 这样可以大大平衡图形负载, 使仿真的实时交互成为可能。
LOD 的生成有两种, 一是预先生成, 有四叉树方法[ 2] 和层次三角形方法[ 3] ; 另一种是随视点变换实时生成。 一般预先生成的层次按误差值进行划分, 误差越小生成的多边形越多。 在实时绘制时, 根据视点位置, 绘制某些层次的多边形。 实时生成地形LOD 与预先生成LOD 相比较, 其LOD层次的过度较平滑, 但计算量较大, 会影响实时交互。 地形LOD 生成解决的主要问题还有要避免不同LOD 地形块在衔接时边界上% 沟&的出现, 它通常是由于两个LOD 层次在边界上选择的点不一致引起的。
2.4 视景的调度
对于大规模的视景数据库, 如几千平方公里,数据量有几十到几百兆, 一次调入内存是不现实的; 而且图形系统为了保证实时性, 每帧绘制的多边形数也不能超过某个上限值。 因此, 对于大规模的视景, 应当将其分块进行调度。 这一要求需要视景构建时的支持。 首先应当根据图形系统的限制估计出每个装载模块的最大多边形数目, 为视景构造提供一个上限值, 在生成特征物及选取地形点时, 一旦生成的多边形数超过这一值, 则不再选点。
视景数据库生成后提供给不同的仿真应用,由于不同仿真实体视域不同, 而且对数据的精度要求亦不同, 因此不同的仿真实体的调度是不同的。
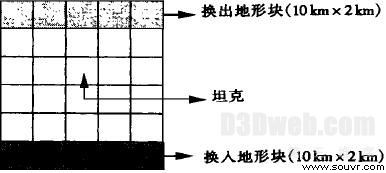
图3 地形换页的调度
图3 是坦克行进中的调度的例子。 就坦克而言, 它可以看到周围10 km × 10 km 范围内的视景,假设当前地形按照2 km ∋ 2 km 进行分块, 内存中只存放周围10 km ∋ 10 km 范围内的地形数据。 当坦克向北行进时, 一旦走过2 km 左右的地形, 则将南边的地形数据换出, 将北边的地形数据换入,换页应当使坦克始终位于地形的中央。
3 视景数据库构造的例子
本文实现的DVENET( Distributed Virtual Environment Network)[4] 将分布在全国不同地域的已有武器仿真器联合在一起, 应用虚拟现实技术研制了一些虚拟的武器仿真平台, 可供不同军兵

