

三维GIS模型构造及算法设计研究

3.1 格雷厄姆算法的实现
首先我们选取值最小的点作为参考点,将离散数据点按照它们与参考点之间的角度的大小对数组进行排序。其中选取x坐标最小点作为参考点有两个原因:①x最小的数据点必定是凸壳的顶点;②选取x最小的点作为参考点,可以使其它数据点与参考点之间的夹角在[-π2,π2]之间,在这个区间中,角度的正切值是随角度的增大而增大的,有利于编程实现。另外,我们使用离散数据数目加1的数组来存储数据点,并将排序后的数据点的第一点的坐标存入数组的最末位置上。
int Convex()
{ 假设凸壳顶点数目等于离散点的数目;
j=1;
for (k=3;k<=凸壳顶点数目;k++)
while (j
{ if (j+1点不是凸壳的顶点)
{ 删除该点,其后所有数据点前移一位;
k=k-1;j=j-1;
凸壳顶点数目减1;}
else j=j+1;}
return 凸壳顶点数目; }
3.2 Bowyer-Watson算法的思想与实现
Bowyer-Watson算法的基本思想:①假定已生成了连接若干个顶点的Delaunay三角网格;②加入一个新的节点,找出所有外接圆包含新加入节点的三角形,并将这些三角形删除,形成一个空腔;③将空腔的节点与新加入的节点连接,形成新的Delaunay三角网格;④调整数据结构,新生成的三角形的数据填充被删除三角形的数据,余者添加在数组的尾部;⑤返回第二步,直至所有的节点都加入为止。
在初始网格的实现中,我们采用的是将凸壳看作是一个空腔,对其进行分割,形成一个符合Delaunay标准的初始三角网。再在此初始三角网格的基础上,应用Bowyer-Watson算法的思想生成最终的三角网。下面是该算法实现的伪代码(假定初始三角网已经生成):
void Gernerate_Delaunay_Net( )
{ 初始三角形数组
将所有待加入的离散数据点放入点堆栈中
while(点堆栈不为空)
{ 初始化边列表为空;
点堆栈进行出栈操作,即弹出一个待加数据点;
for (i=0;i<三角形数组中元素的个数;i++)
{ 计算三角形的外接圆的圆心和半径;
if (待加数据点在三角形的外接圆内)
{ 将该三角形的三条边与边列表中的所有边进行比较;
{ if (该边已经在边列表中存在)
边列表中的这条边的权值变为2;
else if (该边不在边列表中)
则将该边加入边列表;}
将该三角形从三角形数组中移出;}
for (i=0;i<边列表的长度;i++)
{ if (边的权值为1)
{ 将边与待加数据点形成的所有三角形加入到三角形数组中;
}}}}
4 实验结果与分析
对于前述算法,笔者已经用VC++6.0在计算机上实现,实验表明对于TIN模型的生成,该算法是行之有效的。在图1中展示了离散点生成Delaunay三角网的实验结果。以上实验结果,实际上只是地形可视化研究的基础工作,在以后还将涉及到大量数据的试验。造成这样结果的原因是由于数据来源的限制,因此,在我们的实验结果中并非是直接针对实际地形数据做出的模拟;只是一些由笔者自行输入的几十个点数据,目的旨在验证算法的有效性和可行性。对于大幅地形图而言,由于数据的采集量很大,一般都在上万个数据点以上,与这样的数据量相比,实验中所涉及的数据量显然是很小的。实验结果表明,用小数据量的离散点来生成Delaunay三角网时,算法能得到很好的结果;而对于大数据量而言,算法的效率可能会很低,这取决于在计算过程中所生成的三角形的数目。假定输入离散点的数目为n,生成一个由m个顶点构成的凸壳的时间复杂度为O(n logn),生成初始三角网的时间复杂度为O(n2),这期间将对初始三角网进行调整,使其符合Delaunay法则,需要对至多(3n-6-m)条边的搜索,其时间复杂度为O(n),插入点时间复杂度约为O(n2),那么该算法总的时间复杂度约为[O(n2)+O(n)+O(n2)],即O[2n(n+1)].
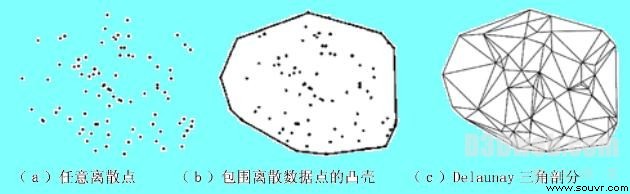
图1 由任意离散点生成Delaunay三角网格
5、结束语
今后,我们将针对海量的实验数据、特征线、特征点等问题,对算法程序进行完善和修改,此外还将对TIN模型,即Delaunay三角网的三维显示进行研究。

