

坦克分队战斗过程的虚拟现实仿真研究

所在位置坐标为观察点坐标,以其观察的距离为半径划圆作为初始观察范围。对于单坦克的观察,可只考虑利用观察器材观察。目标搜索模块如图2所示。
1.3.2 交火条件判断
坦克近距离交火,是通过搜索发现目标并按命令射击进行的。其交火条件有二:一是目标在坦克有效射程内,不在有效射程内的目标,不予考虑;二是有上级下达的射击命令。当有上级下达射击命令时,应首先判断该命令是否下达到了执行单位,如果没有下达到执行单位,则由末端或自动决策将命令分解到执行单位,尔后判断射击命令中指定的目标单位是否在该执行单位的有效射程内,如在有效射程内,则直接射击,如不在有效射程内,待进入有效射程内再进行射击。交火条件判断模块如图3所示。
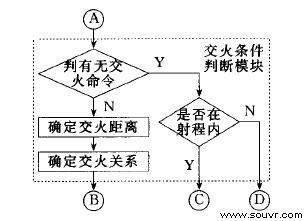
图3 交火条件判断
1.3.3 交火单位选择
确定交火关系时,无论是进攻一方还是防守一方,其一个作战单位的有效射程内可能同时存在多个目标,但如何进行控制也是系统设计所要考虑的问题。对于该系统而言,可以由参训人员根据具体战术原则判定。交火单位选择模块如图4所示。
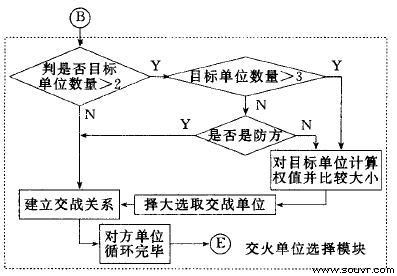
图4 交火单位选择
1.3.4 作战实力修正
对于单坦克在作战的某一时刻,其作战实力由于受到对方火力打击将减小。因此,在进行火力分配、计算毁伤时应以其瞬间的实力为准。作战实力修正如图5所示。
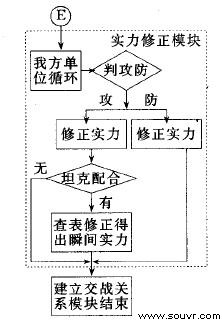
图5 作战实力修正
1.4 火力分配
火力分配是按交火军标指向、交火时机控制等步骤建立基本流程的,其基本流程如图6所示。
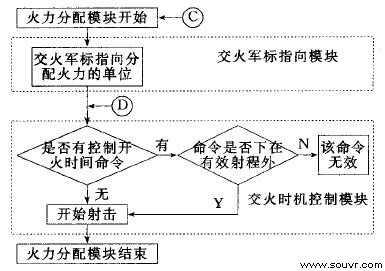
图6 火力分配模块流程
上一篇:虚拟现实飞行仿真器综合火控仿真系统研究[ 10-11 ]
下一篇:基于GIS的应急预案过程动态推演模拟技术研究[ 10-11 ]

