

坦克分队战斗过程的虚拟现实仿真研究

< 随机数,若“发现概率<随机数”为没发现,判定目标是否发现,如果没有一次发现,则表示该目标没有发现。
连侦察区域的确定:集结时由各连警戒范围小于120。,各排小于4O。,境界距离由侦察距离决定。行军时境界360。。疏开时观察范围为向两翼张开各45。。进攻冲击时,观察范围为自己的冲击范围。无规则时,作战实体侦察模型如图1所示。实体侦察模型:采用双层描述方法,分为两个区域,包括两条 1(坦克有效观察距离)射线和两条2(综合观察距离)射线夹成的重叠区域, 1内和户2内的目标发现概率不相同。
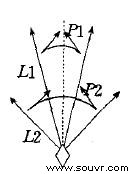
图1 作战实体侦察模型
1.3 交战
交战过程,也就是交战双方兵力、火力对抗的过程。描述交战的目的是得出作战单位交战的兵力、武器损失结果,由于坦克属于直瞄射击火器,坦克分队的交战是在其直射距离内所进行的近距离交战行动,因此在建立交战关系模块时主要按目标搜索、交火条件判断、交火单位选择、实力修正等步骤进行的。其交战关系模块为图2一下页图3~图5。
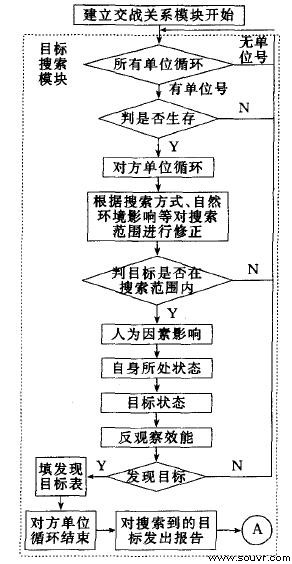
图2 目标搜索
1.3.1 目标搜索
在近距离作战中,进攻车辆依据参训者提供的运动路线以其有效观察距离为半径,对沿途地幅搜索;防守车辆则对其防御正面观察地境内的地幅进行搜索。双方均用肉眼或光学仪器对所能通视的观察范围反复搜索。搜索的结果取决于搜索的方式、范围、环境因素(天候条件、气象条件、火力因素、烟幕、照明等)的影响、人为因素的影响、自身所处的状态(动、静)、目标的状态(大、中、小、动、静、射击、隐、显)和反观察的效能(对传感器的侦测、干扰、排除)等因素。
搜索的方式主要有观察、潜听和利用传感器进行侦测3种。其中观察可分为目视观察和利用观察器材观察。目视观察时,以执行单位所在位置坐标为观察点坐标,以实际观察距离为半径(基本数据)划圆作为初始观察范围;利用观察器材观察时,以执行单位
上一篇:虚拟现实飞行仿真器综合火控仿真系统研究[ 10-11 ]
下一篇:基于GIS的应急预案过程动态推演模拟技术研究[ 10-11 ]

