【应用】通过Xsens动捕为安全的人机交互开发自适应协作界面
意大利理工学院(IIT)的研究员正在利用自适应界面改变人与机器人的协作方式,实现机器人的实时调整和安全无缝的互动。
关键信息
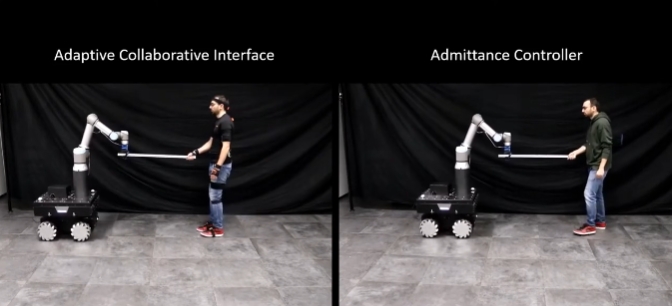
实时适应协作:IIT的两名研究员开发了一种自适应协作界面 (ACI),使机器人能够根据人类的运动意图实时调整自己的动作,从而提高团队协作能力和效率。
未来的应用:这项研究有望应用于医疗保健、应急响应和家庭辅助领域,目标是让机器人能够在现实生活中的非结构化环境中进行直观适应。 几个世纪以来人类一直在与机器合作,而随着机器人革命的不断推进,这种合作正变得越来越平等。意大利理工学院的研究人员Doganay Sirintuna和Idil Ozdamar走在了这一变革的前沿,他们正在研究机器人如何在搬运和运送物品等任务中有效地与人类合作。
新的挑战
近年来意大利理工学院一直积极研究人与机器人的协作,展示了可以执行各种任务的机器人,从协助钻孔到端起咖啡杯。 人机界面与交互实验室的研究员Doganay Sirintuna和Idil Ozdamar正在开发一种框架,使机器人能够协助运输物体。他们的框架被称为自适应协作界面(ACI),利用触觉反馈和动作捕捉数据,使机器人能够调整速度和位置,从而更好地与人类协同工作。
Ozdamar有一项名为“Carrying the Uncarriable”的研究:使用多个机器人搬运笨重物体的变形诊断和人机协作框架,提出一个一人和两个机器人使用柔性带搬运大型可变形物体的框架。在Sirintuna和Ozdamar的相关研究“人机协作搬运具有未知变形特征的物体 ”中,他们探讨了如何搬运从柔性绳索到刚性杆等物品。通过分析人类的动作和力反馈,机器人可以检测搬运物体的变形性,并调整自己的行动。
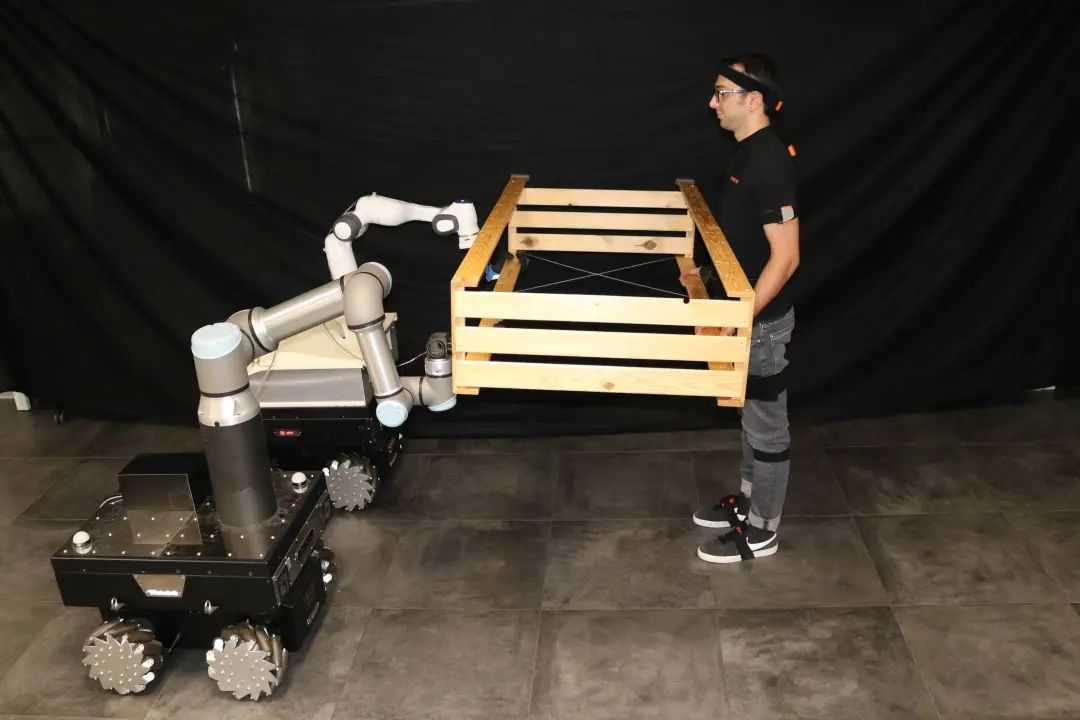
Sirintuna和Ozdamar的研究重点是一个由带轮子的底座(移动机械手)和一个带有多关节的机械臂(协作机器人)组成的机器人。他们解释说:“在设置中,我们有9°的灵活度,带轮子的机器人可以进行快速运动,因此我们选择了一个工业机器人来专注于协作任务。”
为什么选择Xsens
在他们的工作中,Sirintuna和Ozdamar主要依靠Xsens动捕来收集精确的动作数据,从而为机器人提供指导。Xsens使研究人员能够以最少的设置进行实验,因此是实验室环境中的实用选择。Sirintuna和Ozdamar强调与人类密切合作时精确、连续数据的重要性。他们对Xsens的可靠性非常满意并表示:“我们使用Xsens是因为它的数据非常连续,这使我们能够为人机协作提供可靠的数据流。我们尝试过光学传感器。它会出现位置跳跃,影响我们框架的性能。”
他们的研究重点是通过动作数据解读人类意图。Xsens提供了详细的运动学数据,使他们能够对站立不动、推或拉等动作进行分类。通过反复训练,他们在短短三个月内预测人类动作的准确率就达到了98%。“我们将特定的关节位置和角度标记为推或拉,并将其输入系统”,Ozdamar解释到。Sirintuna和Ozdamar还开发了一种算法,通过分析躯干和手部动作来解读人类的旋转动作,目的是制造出能在搬运物体时有效协助转弯等任务的机器人。

研究成果
由于应用了自适应协作界面,Sirintuna和Ozdamar发现,协作机器人能够以更高的精度处理任务,实时预测人类动作,并根据细微数据调整动作。在对不同的可变形物体进行研究时,通过在ACI下操作的机器人的帮助,实验者完成任务的速度更快、工作量更小、效率更高。在用两个机器人协助一个人使用可变形带子搬运大件物品的研究中,ACI使机器人能够更快地做出反应,更好地调整动作,并且需要人使力的部分更少,从而使搬运任务变得更容易。
展望未来,Sirintuna和Ozdamar认为他们的研究有助于医疗保健、应急响应和家庭援助等领域的应用,还能使机器人在公共场合和工作场所普及,以满足受气候变化影响的农业等方面的需求。 然而要实现机器人化的未来,就必须解决人机协作中的安全问题。研究中的机器人采用扭矩控制,配备软关节,程序设计可避免对突如其来的高速撞击或强冲击力做出反应。但正如研究人员所指出的,对于真实世界的应用场景而言,人类行为的不可预测性仍然是最大的挑战。Sirintuna表示:“我们根据预期动作设计算法,但人类的行为往往出人意料。”Ozdamar补充道:“我们可以确保机器人的安全性略高于人类,因为我们可以预测机器人的行为。“ 最终,Sirintuna和Ozdamar的研究为未来机器人能够安全直观地与人类协作奠定了基础,使我们离机器人无缝协助人类日常生活的世界更近一步。