大朋联手 G-Wearables,发力移动 VR 空间定位系统

营造沉浸感,除了对视觉有所要求,还要解放体验者的行动。
空间定位技术对 VR 来说非常重要,它的价值在于,当用户在虚拟世界中发生位移行为,不会因为画面不同步而产生眩晕感。
PC 在线游戏平台 Steam 最新的调查数据显示,HTC Vive 用户可以占到 Steam 平台用户群体的 0.15%,Oculus Rift 的用户群占有率仅为 0.06%。
或许大部分 VR 从业者都有必要感谢两年前 Facebook 和 Oculus 之间的那笔高达 20 亿美金的交易,但遗憾的是,Oculus Rift 并没有像预期的那样争取到更多用户。
HTC Vive 的产品体验处于领先地位,不得不说 Lighthouse 空间定位系统在交互体验上为其增色不少。同样,移动 VR 空间定位技术的实现也在困扰着致力于移动 VR 头显的厂商们。
Oculus CTO John Carmack 在今年 2 月份时表示自己正在为 Gear VR 研究空间定位技术。8 月 3 号凌晨三星举行 Unpacked 发布会,这场发布会的主角除了三星 Galaxy Note 7,还有新版的 Gear VR。很遗憾,还是没有任何关于 Gear VR 移动空间定位系统的消息。
一体机的优势
Gear VR 迟迟不能解决移动空间定位技术的原因在于,手机受限于功耗和传感器,这一点,Google 在今年的 I/O 大会上推出了 Daydream VR 平台之后,已经提出,所有希望支持 Daydream 的手机,在传感器、性能、屏幕方面必须要达到相应的标准。
有业内人士认为,移动 VR 一体机可能是更靠谱的方案。它的硬配空间是自由的,无论是散热、功耗、还是传感器配置。今年 5 月份,大朋 VR 在 Connect 生态战略大会上就发布了一套与 G-Wearable 合作的移动 VR 空间定位系统。这套组合产品即将对外销售。
一位 VR 线下体验店主提到,线下体验需要尽可能缩短设备的调试以及为用户穿脱的时间,PC 端 VR 头盔虽然体验效果不错,但无疑在调试操作上太浪费时间。「用户在体验前,店员需要用 10 分钟左右的时间为其调试,不仅浪费体验时间,用户也很不耐烦」。
大朋 VR 在今年 3 月份发布了可量产的移动 VR 一体机。据官方数据,截至到 5 月中旬,这款产品海内外订单量已经超过两万台。

VR 一体机有自己的屏幕显示、处理单元、供电系统,交互系统、传感系统等,是高集成度的独立 VR 设备。在大空间移动定位系统中,独立 VR 设备优势更加明显,它可以不用像三星 Gear VR 一样需要搭配手机,受到性能、功耗限制。
也可以不必像 htc vive 或者 Oculus Rift 一样需要连接 PC 端,即便 G-Wearable 推出了背包式的 Step VR,对于体验者来说,依然没有起到「减负」的作用。也有人提到「昙花一现」的分体机,但无法离身的游戏手柄实在让人诟病,用户希望的是越来越精简的 VR 设备,而不是拆了东墙补西墙。
北京某教育企业 VR 负责人表示,成本是企业要考虑的主要问题,选择 HTC VIVE,单人体验成本就已经过万,对于大场景多人交互体验来说,这个负担有点重。即便 VR 一体机在体验效果上稍逊 PC 端 VR 头显,但成本上降低几倍不止,并且基本能满足目前需求。
大朋移动 VR 空间定位的实现:激光 + 惯导
G-Wearable 适配到大朋 VR 一体机上的这套移动大空间定位技术是基于激光定位技术实现的,采用具有超高稳定性的激光发射基站实现了无限大空间、无限多个人的室内定位。
但纯粹激光技术有一个很大的问题,如果在多人交互时,彼此阻挡了光源,很容易追踪丢失,G-Wearable 创始人郭成博士介绍,这套移动 VR 定位系统是一套混合系统,除了通过激光进行绝对定位,还搭配了惯性导航技术,进行相对定位辅助,这样在多人交互时,即便激光光源受到阻挡,依然可以进行精准定位。
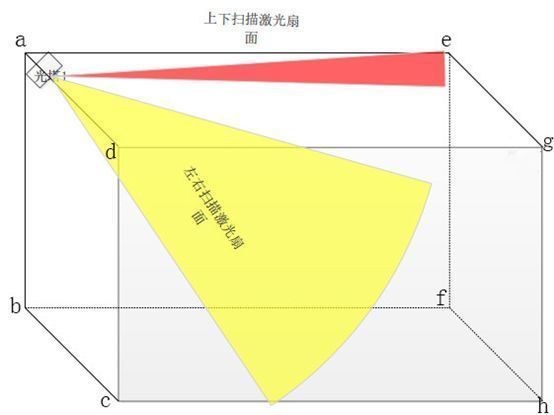
这套系统在定位空间中需要安置多个激光发射基站,通过主动发光定位目标,每个激光发射基站由两个完全正交的同步误差小于 0.02°的超高精度电机,带动 830 纳米的激光扫描整个定位空间,数据刷新帧率高达 90Hz,定位的精准要求基本可以满足。
体验者只需要一台 VR 一体机,就可以在定位空间内随意移动,每个定位点自主定位,无需外部辅助,定位精度能控制在 1mm 内。传统激光定位技术不可扩展,大朋 VR 的这套移动 VR 空间定位系统在很大程度上解决了这个难题。
具体来说,该定位技术是靠激光和光敏传感器来确定运动物体的位置。首先,在定位空间中安装若干个激光发射器,激光定位技术中应用的激光发射器个数可以根据定位空间的大小以及具体的定位需求来确定。
激光发射器中设计有横纵两个方向的扫描模块,分别在水平和垂直方向轮流对定位空间发射横竖激光扫描定位空间。
目标物体上绑定多个光敏传感器。当激光开始扫描的时候系统开始计时,光敏传感器接收到激光后,获得一个时间差,这样横纵两个方向上就获得两个时间差。
根据这两个时间差可以获取光敏传感器与起始位置所成的两个方向上的角度,进而确定光敏传感器与激光发射器之间的一条射线,光敏传感器就在这条射线上。再根据不同光敏传感器之间的几何关系,最终可通过换算得到光敏传感器的位置。