


小米平衡车发布会前的科普:平衡车是如何工作的呢?


近年来,交通的拥堵、资本的热逐和明星的推动,让电动平衡车热了起来。你看,作为价格屠夫的小米也来凑热闹。4月10日,小米向媒体发布邀请函,15日将举行发布会。邀请函上出现了一个指南针图形,暗示将与导航类的产品有关。

但从邀请函上的纳恩博字样我们不难发现,小米此次推出的新品应该为平衡车。
对于国内大众来说,初次开始了解电动平衡车还要追溯到2008年奥运会。当时,场馆里的警卫人员都会骑着由美国 Segway 公司提供的电动平衡车,作为巡逻时的代步工具。
但是当时平衡车这个新宠儿被附上“军用”与“进口”双重光环,让许多人对这个新事物望而止步,以至于平衡车这类产品总是蒙上了一层神秘感。今天,雷锋网就和大家一起来探寻平衡车背后的科学原理,平衡车爱好者们你们准备好了么?
独轮平衡车的工作原理
电动独轮车不倒的原理:
一方面是由于人能够调整重心,调整车前行的方向,车前行的方向发生转变由于惯性就能平衡重力的侧翻力矩。还有重要的一点是高速旋转的轮子具有较大的角动量,角动量能够抵抗外力矩,就好比陀螺不倒一样。在大学物理里,这种现象叫进动,自传体能把外力矩的方向旋转90度。在这里就是轮子把侧翻力矩变成使自行车转向的力矩。
利用电机来加强改进平衡:
在此基础上,自平衡电动独轮车加以改进,靠电机驱动的,采用陀螺仪与驱动电路控制保持不倒。把身体向前倾斜就可以启动。速度则是由身体的倾斜程度来控制的,想要加速则向前倾,减速则向后倾。
抛开人的主动操控,独轮平衡车保证正常工作一定离不开加速度传感器和角速度传感器(陀螺仪)
加速度传感器:
加速度传感器可以测量由地球引力作用或者物体运动所产生的加速度。只需要测量其中一个方向上的加速度值,就可以计算出车倾角。比如使用X 轴向上的加速度信号,车直立时,固定加速度器在X轴水平方向,此时输出信号为零偏电压信号。当车发生倾斜时,重力加速度g 便会在X 轴方向形成加速度分量,从而引起该轴输出信号的变化。
但在实际车运行过程中,由于平衡车本身的运动所产生的加速度会产生很大的干扰信号叠加在上述测量信号上,使得输出信号无法准确反映真正的倾角。因此对于直立控制所需要的姿态信息不能完全由加速度传感器来获得。
角速度传感器:
陀螺仪可以用来测量物体的旋转角速度。平衡车上安装陀螺仪,可以测量车倾斜的角速度,将角速度信号进行积分处理便可以得到车的倾角。
平衡车的核心部件:
(点击右上角放大镜图标查看动态图片)
谈到平衡我们就不得不说到陀螺仪,陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
加速度和角速度两个传感器都无法单独获得动态情况下的准确,稳定的姿态,但是这两种传感器具有互补性,即加速度传感器,在静态情况下使用效果会好一些,陀螺仪在动态情况下使用,效果会好一些。此时,就需要一种算法,来将这两种信号进行有效融合,才能获取准确的姿态信息。

所以电动独轮平衡车主要通过控制器(智能芯片)、姿态传感器(陀螺仪)、执行器(电机)三部分来实现平衡。当驾驶者倾斜身体时,姿态传感器输出相应姿态信息,控制器感知到这个信息后,命令电机向相应方向旋转,姿态传感器按一定频率不停地测量车子姿态,并输出姿态息到控制器,控制器不停地调整电机的转动方向和转速,这样就保持了一个动态的平衡。
双轮平衡车的工作原理

与独轮平衡车相比,双轮最大的区别便是多了一个轮子和操纵杆,但它与电动自行车和摩托车车轮前后排列方式不同,而是采用两轮并排固定的方式,就像一种两轮平行的机器人一样。两轮自平衡控制系统是一种两轮左右平行布置的,像传统的倒立摆一样,本身是一个自然不稳定体,必须施加强有力的控制手段才能使之稳定。因为两轮平衡车具有运动灵活、智能控制、操作简单、节省能源、绿色环保、转弯半径为零等优点,所以它适用于在狭小空间内运行。
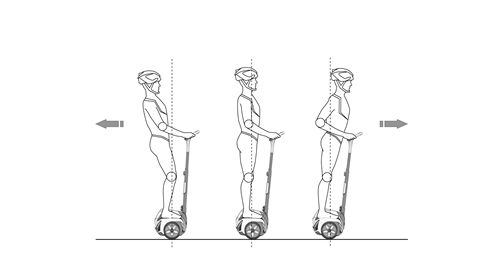
双轮平衡车的工作原理,非常类似于我们人体自身的平衡系统。就我们的人体而言,当身体重心前倾时,为了保证平衡,我们需要往前走;而当重心后倾时,我们需要往后走,其中也是同样的道理。
当我们在驾驶平衡车的时候,平衡车的两个轮子就代替了双脚。与身体的平衡系统非常类似,当我们的重心前倾时,智能系统就会自动感应到,并精确地驱动轮子向前运动,以保持平衡;同样地,当我们身体的重心后倾时,轮子就会向后运动。
这套工作原理被称为“动态平衡”原理,这也是平衡车被叫做“平衡车”的原因;有时也被叫做“体感车”,这是因为它能感应身体重心的变化,因驾驶者姿态的变化而改变行驶状态;有时也被叫做“思维车”,这是因为它能够智能感应重心变化、智能调整姿态和运行状态。
平衡车利用“动态平衡”原理,采用第二代运动补偿算法,利用其内部的陀螺仪和加速度传感器,来精确检测车体姿态的微小变化,并利用精密的伺服控制系统,灵敏地驱动电机,进行相应的调整,以保持整个车体的稳定和平衡。
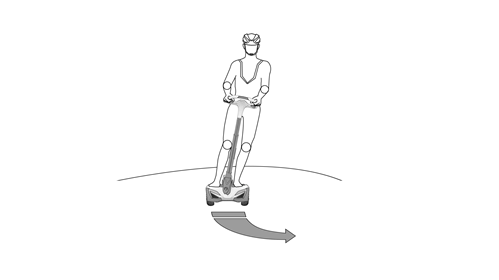
当我们旋转方向操纵杆时,运行系统会相应地控制左右两边的速度差,以此来实现车体的转向。因此在骑行过程中,将方向操纵杆指向您需要前进的方向时,车体将会朝着我们指向的方向行驶。当方向操纵杆处于车体正中间位置时,系统将朝正前方行驶。并且在转向时,如果身体跟随方向操纵杆倾斜的方向倾斜,那么我们将会获得更好的转向体验。
平衡车不仅拥有时尚动感的炫酷外观,在其内部有一个极致精密的智能运行系统,用“秀于外,慧于中”来形容最贴切不过了。但也是这样一款产品却一直穿梭在监管的灰色地带,部分地区交管部门已经限制平衡车上路,未来电动平衡车将驶向何方,还很不明朗,而小米的加入能否将平衡车行业带入正轨,一切也还是未知数。

