【实拍教程】双机立体拍摄的模型-拍摄参数对立体视差的影响

常言道:近大远小。在立体拍摄时,把2张相片的“近大”偏移量减去“远小”偏移量,其结果就是立体视差。
采样双机立体图片拍摄时,两个不同距离的前后物点在两张像片的视差决定立体视觉的效果。如果立体视差接近零,立体效果差,若立体视差过大,则会“涨眼”甚至立体合成失败。
本文基于泰山学院的陈君所介绍的“立体视差”简化模型,对双机立体拍摄的模型-拍摄参数对立体视差的影响作进一步分析。
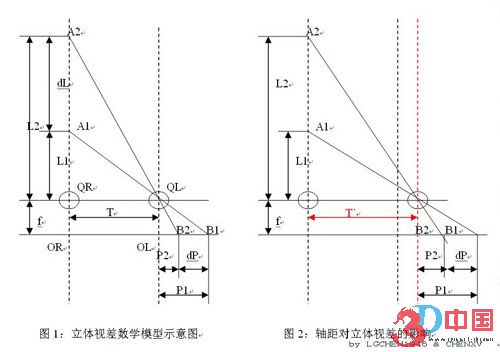
如图1,对前点A1和后点A2,有QR(左)和QL(右)的2次拍摄;令QR 放置在A1-A2的沿伸轴上,故A1、A2在像片R上的成像重合且皆落在相机光轴的延伸点OR上。令QL 的焦距与QR一致为f,放置在与QR光轴平行且与QR相距T的位置。A1、A2在像片L上分别形成B1、B2的像点。它们与光轴中心的距离分别为P1和P2。
有立体视差dP=P1-P2。
P1=f*T/L1
P2=F*T/L2
dP=P1-P2=f*T*(L2-L11)/(L1*L2)
令前后点A1、A2的距离为dL=L2-L1
则有:
dP=P1-P2=f*T*dL/(L1*(dL+L1)
这就是立体视差的数学模型。式中 dP:立体视差;P1:前景成像偏移量;P2 :后景成像偏移量;f:相机焦距;T:两机光轴距简称-轴距; L1:前景距离;L2:后景距离;dL:前后景间距。
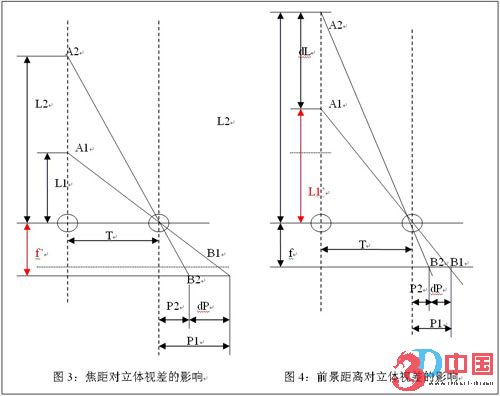
我们无法改变前后景间距dL,但我们可以根据立体视差模型,通过前景距离(走前或后退)、焦距和轴距的调整来控制立体视差。可以通过走近物体、加长镜头焦距或加大轴距来提高立体视觉效果,其原理见图2、图3和图4。
目前尚未查获有关立体视差“最佳设计”的资料。我个人认为,立体视差是一个生理特征值,应该与视场宽度的百分比相关,其计算的原理与光圈与景深的算法思路类似。这方面的检索、统计、试验和分析有较大的工作量,且可能没有标准解。故希望有更多的朋友参与相关的工作,共同突破。若我的研究有结果也一定拿出分享。再请等待“下回分解”。
采用WORD绘图,比较粗糙,位置也不准确,敬请原谅。