


卫星任务规划可视化仿真系统设计与实现

来源:第三维度
作者:何川东,郭玉华,李军,靳肖闪
单位:国防科学技术大学电子科学与工程学院(湖南长沙)
摘要:解决卫星任务规划方案正确性、可靠性问题的有效途径是建立可视化仿真分析环境,研究多星多地面站任务规划问题,设计了成像需求约束图模型,利用任务规划调度算法进行优化分析生成最优解决方案,同时研究利用基于MapX的地理信息系统功能,设计实现了卫星任务规划可视化仿真系统,实现了二维视景仿真、方案动作仿真以及可视化决策支持等功能。该系统为卫星任务规划的可视化决策、可视化仿真提供了基础,确保了其正确、可靠性。
1 引言
卫星任务规划问题是一个比较复杂的问题,该问题涉及多星多地面站,成像目标数量众多,同时需综合考虑各种约束条件,为成像卫星分配拍摄任务并对具体的成像计划进行编制调度,从而合理利用卫星资源,充分发挥卫星的成像能力 j。卫星任务规划方案的合理性、正确性直接关系到航天任务的效果,需要对其进行可视化仿真检验,以确保其可靠性,同时需要对决策人员提供可视化决策支持。
本文研究针对多星多地面站任务规划问题,设计了成像需求约束图模型,利用任务规划调度算法进行优化分析生成最优解决方案。同时利用MapX控件嵌入卫星任务规划可视化系统,实现了二维视景仿真、方案动作仿真,以及可视化修改、属性查询、空间查询等丰富的GIS系统功能,从而实现了卫星任务规划的快速化、可视化、以及多功能性,为任务规划方案的优选、优化、仿真、验证提供了基础。
2 系统设计思想与结构
卫星任务规划可视化仿真系统是一项涉及多个方面的总体设计系统,包括卫星成像计划、有效载荷计划、地面站跟踪接收等。在任务规划阶段,根据用户的特定要求,以及任务规划所受的各种约束条件,如太阳高度角、卫星之间、卫星与地面站之间的冲突等等,构建成像节点约束模型,调用任务规划调度算法迅速生成最优解决方案。
一个成像方案不仅由大量成像目标组成,还包括有效载荷控制计划、跟踪接收计划。有效载荷控制计划指卫星载荷动作及相应动作执行时间,如侧摆、开关机、数据下传等,以控制卫星的运行;跟踪接收计划指卫星何时进出站,地面站何时接收数据、何时向卫星注入指令等一系列测控动作。
可视化仿真系统就是将任务规划的优化方案以二维视景仿真、方案动作仿真、以及决策信息示意等方式形象地演示出来,以辅助决策人员做出最终决策。卫星任务规划可视化仿真系统设计思路如图所示。
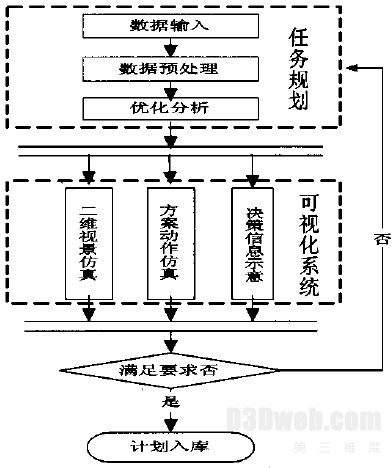
图1 卫星任务规划可视化仿真系统设计思想与结构
3 系统主要功能设计及其实现机制
为了实现卫星任务规划的计算、仿真、验证与可视化调整的一体化、全过程,该系统提供可视化人机交互的任务规划,二维视景仿真、方案动作仿真以及方案可视化修改等主要功能,为卫星任务规划提供可视化仿真、可视化决策支持。
3.1 可视交互的任务规划
由于任务规划的请求成像目标来自不同用户,不同用户对成像效果、成像时效性、数据传输等的要求也不相同,而每次计划不可能完全满足每个用户的需求,这就要求任务规划时决策人员能较好的干预最终方案的生成。所以该系统实现了较好的人机交互功能。在任务规划时,首先构建出成像节点约束模型,再调用调度算法生成优化方案。下面分别予以介绍:
1)成像节点约束模型
一个成像方案由若干目标组成,每个成像节点可以抽象为一个顶点,如果两个节点之间满足卫星侧摆关系,则存在连通性,我们抽象为一条边。根据图论的理论,我们将成像节点按时间顺序建立一个无圈有向图,即成像节点约束图 。生成一个计划方案即是求解图中的一条优化路径。
2)任务规划调度算法
为了提高卫星成像效率,我们希望每个方案都能成像尽可能多的目标,即对应为数学上的最短路径问题。同时希望每次计划卫星都能尽可能消耗最少的资源,而成像尽可能重要、成像效果尽可能好的目标,这就要求任务规划方案在不同准则下尽可能优化,据此本文把该问题抽象为多准则最短路径问题(K短路径问题),利用K短路径算法求解成像节点约束图中的最优解决方案 。
限于篇幅,这里只介绍任务规划的核心调度算法。本文采用基于标记更新的k短路径算法作为任务规划调度算法,求解成像节点约束图中多条优化路径。算法思想如下,首先做如下定义:
M(j):从顶点s到j的路径标记集合
Pred(J):顶点J的前趋顶点
Succ(j):顶点j的所有后继顶点集合
P= (S,⋯.,Pred(j),j):从s到j的一条路径
L =(g(P),Pred(j), i):从顶点s到j的路径P的标记
v(j):目标成像连通图G的顶点j
updateLabel(Li,v(j)):根据顶点i的标记和后一顶点J的属性,更新顶点i的标记值相应的任务规划调度算法为:算法:任务规划调度算法
Begin
输入: 目标成像连通图G
输出:从顶点S至顶点T之间的K条优化路径
1)For i=l⋯ .IvI //遍历图G 的顶点
2) Li=updateLabel(Lvr~i1,v(i))//顶点标记付初值
3)Endfor
4)For i=l,⋯lVI
5) For allj∈Succ(i)
6) For all Li∈M(i)
7) L’=updateLabel(Li,v(j))//更新标记
8) End for
9) Ly=labelChoose(Lj, )//选择较优标记
10) Lj—L
11) End for
12)Endfor
End
3.2 二维视景仿真
为了形象、直观的演示卫星任务全过程,我们利用基于MapX的GIS系统形象的在二维地图上演示卫星的运行轨迹、成像区域、地面站跟踪接收范围等。与卫星任务规划有关的二维模型主要包括背景地图模型、卫星模型、地面站模型、卫星星下点轨迹模型、有效载荷覆盖范围等 ],其中星下点轨迹模型与有效载荷覆盖范围是核心,卫星与地面站模型可以采用简化模型。
1) 星下点轨迹模型
卫星在地球表面的投影点(卫星和地心连线与地面的交点)叫星下点,所有星下点连成的曲线叫星下点轨迹。二维地图上所表示的为其地图投影,投影方法采用等经纬度投影。星下点轨迹的几何模型用线条表示,线条可以设置颜色、粗细、线形等属性。
2)有效载荷覆盖范围、地面站跟踪接收范围模型
由于卫星受能源限制,有效载荷不可能一直开机,所以卫星成像区域是有限的。地面站由于受设备性能、地理条件等限制,每个地面站的跟踪接收也有一定范围限制。为了形象直观的演示卫星有效载荷覆盖范围、地面站跟踪接收范围,该系统在地图上根据卫星侧摆角、视场角、轨道倾角、成像动作等约束条件绘制出卫星有效载荷覆盖范围以及地面站跟踪接收范围,使决策人员直观的了解卫星成像区域、判断成像效率。限于篇幅这里只介绍绘制卫星有效载荷覆盖范围的流程,如图2所示。

图2 卫星有效载荷覆盖范围模型构建流程图
3.3 方案动作仿真
卫星在成像过程中,有一系列动作如开关机、侧摆、拍摄等,而在二维视景仿真中是以经纬度为坐标轴,不能详细的表示卫星动作过程,所以本文设计了方案动作仿真。方案动作仿真以卫星侧摆角为横轴和成像时间为纵轴,从卫星侧摆和成像范围的角度显示卫星动作信息。
与方案动作仿真有关的模型主要有背景地图、星下点轨迹和动作执行轨迹模型。其中背景地图不再用世界地图为背景,而是用纵向竖直的线条表示侧摆角,以卫星的星下点轨迹为主轴向两边延伸。星下点轨迹投影不再用等经纬度投影,而是用直线表示,即是以卫星为参考系,观察星载传感器侧摆、开关机、拍摄等过程。动作执行轨迹的几何模型用线条表示,针对不同动作,用不用颜色的线条表示以更形象的演示卫星运行情况。方案动作仿真流程如图3所示。
3.4 可视化修改
该系统利用MapX控件可以动态添加、删除目标,数据绑定,图形与属性互查等特性实现了方案的可视化修改,即通过对地图的操作,在地图上对候选方案进行删除、添加目标、或者修改卫星开关机时间等操作。

图3 方案动作仿真流程图
当决策人员对方案进行修改时,必须同时对其进行约束检测,以判断该修改是否满足约束条件,因此本文设计了可视化修改约束检测算法。约束检测算法主要用于检验修改后方案的正确性、可行性,对不满足约束条件的修改给出相应提示信息。
可视化修改约束检测算法思想如下,首先做如下定义:vAction:方案动作序列vAction(j).Tgt:动作j的目标编号tS(j):动作J的起始时间tE(J):动作j的结束时间tA(j):目标J的访问时间nTgtSN:修改目标编号相应的约束检测算法如下:
算法:可视化修改约束检测算法
Begin
输入;方案信息,修改动作编号,修改点目标编号或者卫星开关机时间
输出:是否满足约束
1)Switch(修改动作编号)
2) Case 删除目标:
3) For i=l,,IvActionI
4) IfnTgtSN==vAcfion(D.Tgt then
5) modifyAction(i) ,/修改卫星成像动作i
6) modifyStore //修改卫星存储器容量
71 retIIm true
8、 Endfor
9) Case增加目标:
l0) For i-l,,IvActionI
l1) If tS(i)<tA((nTgtSN) && tA(nTgtSN)<tE01 then
12) modifyAction(i) ,/修改卫星成像动作i
13) modifyStore ,/修改卫星存储器容量
l4) if 满足存储器容量约束then
15) returntrue
16) Else if tA(nTgtSN)>tE0)&&tA(nTgtSN)<tS(i+1)then
17) addAcfion ,/增加成像动作
18) modifyStore ,/修改卫星存储器容量
l9) If满足存储器容量约束&& 满足侧摆约束then
20) returntrue
21)Case修改开关机时间:
22) If满足存储器容量约束then
23) returntrue
End
4 应用实例
该系统已经成功应用于某航天侦察任务规划系统,下面以该系统为例介绍卫星任务规划可视化仿真系统各个部分的具体应用。在任务规划阶段,生成优化解决方案,同时启动可视化系统模块,把数据送入以进行可视化仿真检验,其界面如图4所示。

图4 卫星任务规划可视化系统界面
该系统采用双屏技术,其中左边屏为数据操作界面,右边屏为地图操作界面。地图操作界面中右边视图为二维视景仿真,左上视图为方案动作仿真,左下视图为决策信息视图。
当点击其中的目标时,其属性就会自动在左下决策信息视图中显示,也可以放大左上视图以查看卫星侧摆时间、开关机时问、成像目标等信息,也可以点击工具栏中的查找工具,输入目标编号就会查找此目标,并在二维视景仿真视图中以该目标为中心并高亮显示。
5 结束语
该系统通过建立成像约束图模型,利用任务规划调度算法生成最优解决方案,同时通过嵌入MapX控件,利用GIS系统功能,实现了成像方案的可视化仿真,把成像方案形象、直观地演示给决策人员,供决策人员进行决策。从而实现了对卫星任务规划的规划、可视化决策支持、仿真、验证于一体的数字化,节省了时间、提高了质量。
由于系统的开发时间短,还存在许多不足之处。下一步主要从两方面对系统进行改进,一是继续对系统的调度算法进行研究,使得系统对于大规模任务调度问题处理效率更高,二是研究系统的三维可视化仿真,使得系统能逼真的再现空间环境。
参考文献:
[1] 张帆.成像卫星计划编制中的约束建模及优化求解技术研究[D].国防科学技术大学博士学位论文,2005.
[2] 陈慧中.成像卫星任务规划调度机制与辅助决策技术研究[D].国防科学技术大学硕士学位论文,2005
[3] 张帆,李军,王钧,景宁.基于有效准则矢量生成的成像调度方法[J].航天控制,Dec.2005,23(6):81—84;
[4] 贺仁杰,刘洋,谭跃进.卫星任务调度系统的设计与实现[J].计算机工程与应用,2003,14:1—3.
[5]李连军,戴金海.利用OpenGL实现卫星系统可视化仿真模型的研究[J].计算机仿真,2004—10,21(10):34—37.
[6] 胡蜂,孙国基.航天仿真技术的现状及展望[J].系统仿真学报,April.1999,11(2).83—88.
[7] 鲁建厦,方荣,兰秀菊.国内仿真技术的研究热点—— 系统仿真学报近期论文综述[J].系统仿真学报,Sept.2004,16(9):1910—1913.
[作者简介]
何川东(1982一),男(汉族),四川通江县人,国防科学技术大学电子科学与工程学院硕士研究生,主要研究方向:遥感与地理信息集成技术。
郭玉华(1981一),男(汉族),河南驻马店人,国防科学技术大学电子科学与工程学院博士研究生,主要研究方向:进化算法、地理信息系统与数据库。
李 军(1973一),男(汉族),湖南益阳人,博士,国防科学技术大学电子科学与工程学院副教授,主要研究方向:GIS、数据库技术与3s集成技术。
靳肖闪(1978一),男(汉族),河北元氏县人,国防科学技术大学电子科学与工程学院博士研究生,主要研究方向:地理信息系统与数据库技术。

