


机械机构运动虚拟仿真分析

来源:第三维度
作者:韩锐(硕士学位论文)
《 基于SolidWorks的机构运动仿真研究》第三章
3 机构运动分析
机构运动分析是研究机械共性问题的重要方法,也是机构动力分析的基础,古典的机构运动分析图解法比较直观,能够满足一般工程应用的精度要求,但是对于高精度要求的机构分析,通常采用解析法。机构分析向量解析法的基本思路是写出机构的封闭向量多边形在xy 坐标轴上的投影方程式(位置方程),求解得到运动轨迹方程。本章主要介绍槽轮机构,导杆机构,曲柄滑块机构,凸轮机构等的运动分析。
3.1 槽轮机构【7】【8】
如图 3-1 所示,槽轮机构由具有圆销的主动销轮和具有直槽的从动槽轮构成,主动销轮作连续转动,当圆销未进入径向槽时,槽轮内凹的锁止弧被销轮的锁止弧锁住而静止;当圆销开始进入径向槽时,锁止弧脱开,槽轮在圆销的驱动下转动;当圆销开始脱离径向槽时,锁止弧又被锁住而静止,从而实现从动槽轮的间歇转动。
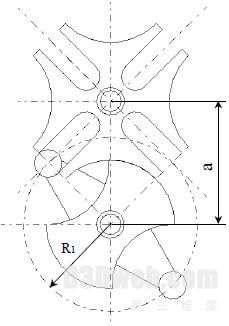
图3-1 槽轮机构
图3-1 的槽轮机构中,槽轮和销轮的中心距为a ,圆销的中心回转半径为1 R ,销轮的转角为1ϕ ,槽轮的转角为φ2,均匀分布的圆销数为n ,槽数为z 。当主动销轮转动一周时,从动槽轮的运动时间2 t 与主动销轮的运动时间1 t 之比,称为槽轮机构的运动系数,用τ 表示,即

由于槽轮是作间歇转动的,故必须有停歇时间,所以运动系数总是小于1,因此又(3-1)式可得,主动拨盘的圆销数n 与槽轮槽数z 的关系式为

当n = 2, z = 4时,代入(3-1)式可得图3-1 所示的槽轮机构π=1/2 。
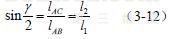
图3-2 所示为槽轮机构中圆销和轮槽处在运动期间的任意位置,主动拨盘转角1ϕ 和从动槽轮转角2ϕ 之间的关系为

式中a 为中心距O1 O2 , R1 为圆销的中心回转半径,令 代入(3-3)式,得到
代入(3-3)式,得到

式(3-4)适用于槽轮运动期间,当槽轮机构处于锁止状态时Φ2不随Φ1ϕ改变。
3.2 曲柄滑块机构【9】
如图3-3、3-4 所示的对心曲柄滑块机构中, 当曲柄AB 绕轴心A 整周回转时,滑块C 便在导路内往复运动,已知曲柄长度1 l 、曲柄转角1ϕ 及连杆长度2 l ,则曲柄AB 能整周回转的条件为

当曲柄整周转动时,滑块的铰接中心C 到曲柄回转中心A 的距离c x 的变化范围为

两极限位置间的距离为滑块的行程S,其表达式为

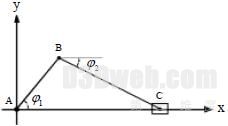
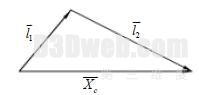
图3-3 曲柄滑块机构简图 图3-4 曲柄滑块机构向量图
根据已知条件,求解连杆的转角2ϕ 以及滑块的位置Xc 。
机构的封闭向量方程式为:

在两个坐标轴上的投影方程为:

由式(3-9)的第二式得:

上式中λ =______ 为曲柄与连杆的长度比,由该式可求出连杆的转角2ϕ 。
求解滑块的位置c x ,首先要从公式(3-10)中求得2ϕ ,代入(3-9)第一式,求得:

3.3 导杆机构【10】【11】
如图3-5 所示的摆动导杆机构中, 主动件是曲柄AC,当其整周旋转时,滑块便在导杆BC 上滑动,导杆BC 绕固定轴心B 往复摆动。当曲柄转到与导杆垂直时,就是导杆的极限位置,已知曲柄长度2 l ,曲柄转角2ϕ ,


图3-5 导杆机构简图 图3-6 导杆机构向量图
曲柄等角速度2ω 及中心距1 l ,摆角γ 为两极限位置夹角, 则
下面根据已知条件推导导杆的转角3 ϕ。图3-6 所示的机构的封闭向量方程式为:

在两个坐标轴上的投影方程为:

两式相除,得到:

由(3-15)式可求出导杆的转角3ϕ 。

3.4 凸轮机构【7】【12】
如图 3-7 所示的凸轮机构,凸轮绕轴O 转动,推动从动杆在导路中上下往复运动。当从动件处于最高位置时,凸轮轮廓曲线与从动件在A点接触,接触点到绕轴O 的距离为OA,现在设想凸轮固定不动,让从动件连同导路一起绕轴O 转过ϕ 角,接触点到绕轴O 的距离为OB。已知凸轮的为椭圆形,凸轮绕轴O 在凸轮几何中心正下方,其结构尺寸如图3-8 所示,现在要根据已知的结构数据,求解出坐标轴平移、旋转后OB 的表达式。
假设原坐标系的坐标分别为x, y ,坐标变换后的坐标分别为x, y 。当坐标原点位于椭圆的几何中心时,椭圆的方程为

由图3-6 可知,a=37,b=33,代入(3-17)式,得坐标轴改变之前的椭圆方程为:
坐标轴平移变换的方程为

坐标轴旋转变换的方程为

在本文的椭圆凸轮中,由图3-8 可知, 0 x = 0, 0 y = -15,代入(3-21)式,得出坐标轴平移、旋转后的表达式为

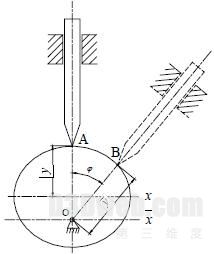
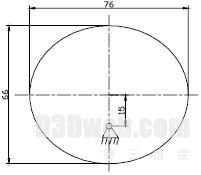
图3-7 凸轮机构 图3-8 凸轮结构尺寸图
将(3-22)式代入(3-18)式,即

整理(3-23)式,得到y 的一元二次方程为

一元二次方程的求根公式为

由(3-24)式可知a =,c = −1245816,代入(3-25)式,并舍去负根,可求出y 的表达式。

