


基于HLA/RTI的联合仿真建模技术框架

来源:第三维度
作者:曹琦 ,何中市 ,余磊 ,罗挺
摘要:针对复杂系统仿真建模中存在的分布式交互、协同性及动态性等问题,分别着重研究了HLA/RTI、人工生命MAS、DEVS等仿真建模技术及其相互间的联合策略,在HLA/RTI高层软件体系框架下,以人工生命MAS为系统基本单元建模,以DEVS为系统基础环境建模,并在此基础上,提出了一种联合仿真建模技术框架,给出了在军事后勤保障仿真建模中的应用实例。
引 言
金融领域中价格的波动、城市交通的流动模式、生态环境中的物种演化以及军事领域中的作战模拟等,都是非常复杂的系统,通常,在其特定内外部环境下具有智能性、适应性主体(Adaptive Agent),每个主体会和其它主体或者环境基于局部信息进行交互并获取信息。仿真是研究这类复杂系统的一个重要途径,通过对系统进行建模描述,建立仿真系统,对于领域专家研究复杂系统的行为和特性、预测系统变化范围和发展趋势,领域人员从事系统内的作业活动、进行业务训练和演习等,具有十分重要的意义。
目前,国际上已经有多种基于Agent的仿真建模系统,如美国桑塔菲研究所的Swarm、SourceForge的Repast、芝加哥大学社会与经济动态性研究中心的Ascape等。这些系统的基本单元为Agent/Swarm,支持层次仿真方式和层次式的调度方式,允许用户显式建造和测试多层模型,便于描述“涌现”现象,对于小规模的复杂系统建模方便,仿真速度快-lJo但是,随着系统规模的增大,还需在以下方面进一步完善:
(1)分布式交互。复杂系统的Agent的数量非常大,随着系统研究的逐步深入,系统本身分布的特点和系统研究人员的分布性要求进行分布式交互仿真;
(2)协同性。Swarm把各个仿真事件放到队列中进行调度,不能充分反映Agent之间事件的随机性,需要采用更为有效的方式,充分实现仿真对象之间中的协同性;
(3)动态性。传统数学模型把复杂系统视为一个确定性过程,不能很好地描述系统推进过程中表现出的复杂态势变化与内在的动力学机制,需要进一步刻画系统的动态性。
所以,围绕上述问题的研究成为当前的热点,本文在已有仿真技术的基础上提出了一种联合仿真建模技术框架,以期提高复杂系统的建模能力。
1 仿真建模技术的分析
1.1 HLA/RTI
美国国防部提出了用于解决军事仿真中异构仿真器间互操作和仿真对象可重用问题的接口标准HLA (High LevelArchitecture),明确定义了各类仿真模型的描述规范和接口规范,其核心由HLA框架与规则、运行时间支撑系统RTI(Run Time Infrastructure)接口规范和对象模型样板OMT(Object Model Template)组成,这为开发和执行协同分布式仿真应用系统提供了高层软件体系框架。但HLA标准中没有涉及有关HLA联邦的建模方法,因此,如何高效、合理地建立基于HLA/RTI的协同仿真模型成为研究的重点。
1.2人工生命MAS
人工生命AL(A~ificial Life)研究的是具有生命特征的‘ 人工系统,它通过对子单元之间的相互作用规则及演化方式的调整,来分析全局演化行为和整体的综合特征,可为复杂系统的仿真建模提供有效而实际的途径。将系统基本单元抽象为Agent, 构建多智能体系统MAS(Multiple AgentsSystem),通过Agent之间的相互作用研究复杂系统的突现行为,则可以很好地揭示系统本质和演化规律。目前将人工生命与MAS理论相结合的仿真研究并不多,如AlexandrosMoukas等人将能进化的MAS用于Web信息过滤与发现[ 、余有明等人提出将人工生命MAS用于作战模拟[ 等。但MAS的优势在于它的自主性能,更多的是关注个体建模与交互,对于复杂系统中的基础环境类元素,并不能进行层次化的描述,因此,有必要区分系统元素的类型,采取不同的建模技术。关于将MAS建立在HLA/RTI框架基础上的研究也多是停留在尝试探索阶段,如Gary Kratkiewicz等人分析了将基于Agent的仿真模型集成到HLA联邦中的思路[ 、高志年等人提出了一种基于HLA的MAS体系结构[ 、侯锋等人在研究多Agent仿真方法中尝试采用HLA/RTI作为支撑环境_6J,但基于HLA/RTI的人工生命MAS组织协作方式及技术实现还有待进一步深入研究。
1.3 DEVS
DEVS(Discrete Event System Specification)是一种离散事件系统形式化描述体系,它将每个子系统看作一个具有内部独立结构和输入输出接口的模块,这些模块通过连接关系组合成为更大的模块,从而形成规范化、层次化、模块化的描述,Cel1 DEVS则是对DEVS的扩展,通过具有时间延迟的细胞模型构建离散网格空间来执行DEVS(本文涉及DEVS的分析均以DEVS/Cel1.DEVS为主)。可以将DEVS与其它方法联合建立复杂系统的离散仿真模型,以发挥其层次化和模块化的优势,弥补MAS建模技术的不足。虽然GabridWainer等人利用DEVS建立了各种不同的国防仿真模型(如雷达发射/接收模型、目标探寻装置模型等)[ 、韩守鹏等人利用DEVS设计了通用数据驱动实时仿真环境[8],但尚无将DEVS与人工生命MAS进行联合研究的先例。目前还有许多其它离散事件建模工具,如杨青生等人采用元胞自动机CA (CellularAutomata)来模拟复杂城市系统 ,但就国防仿真建模而言,Gabriel Wainer等人认为DEVS比CA更适合[ 。关于DEVS与HLA的联合问题,B.EZeiglert 、Jong.Keun Lee[11]、郭斌 等人已经进行了一些研究,但DEVS与人工生命MAS分工合作方式下与HLA/RTI的联合问题,则是亟待解决的技术难题。
2 仿真建模技术的局部联合策略
2.1 HLA/RTI与MAS的联合
MAS仿真环境需要的大部分功能都可以由HLA的RTI服务提供,包括Agent控制、信息分发、事件处理和时间推进等,其中对Agent状态更新和明确事件的处理有强大的支持,时间管理机制也相当灵活。采用HLA/RTI作为MAS支撑环境,可以充分利用HLA的建模范型以及RTI的强大功能,使Agent分布仿真环境更加通用和灵活。从Agent的角度看,完全采用HLA/RTIJ]~务作为MAS仿真框架还不完备,其中最重要的是缺少对Agent之间通信的支持,因为这需要由Agent通信语言(ACL)来定义,而HLA/RTI体系框架无法描述这类问题[13]。可采用在Agent~RTI之间增加中间层(ML)的办法(如图1所示),ML对所有作为HLA联邦成员加入到仿真环境中的Adaptive Agent之间的通信进行封装和解释,从而在HLA/RTI框架中增加了对Agent之间的通信以及对ACL的支持。由于经过ML封装信息,Agentf~的数据流通量可能会有所增加,可采用RTI的路由空问限制数据分发的数量。
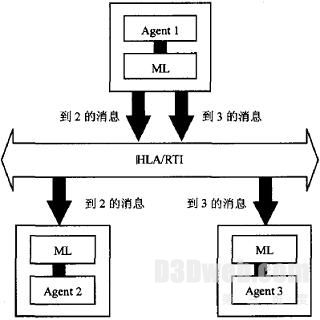
图1 在Agent和HLA/RTI间增加ML
2.2人工生命与MAS的联合
人工生命的研究对象是具有自然生命特征和生命现象的人造系统,研究的重点是人造系统的模型生成方法、关键算法和实现技术,它为系统仿真研究提供了新的思想方法,即采用遗传操作过程和进化计算的机制来描述系统的演化过程。将人工生命理论引入到MAs中,Agent变为一种能够自我生存、自我表现、自我演变,甚至具有一定外观形态的新型Agent,能够表现自然生命的特征和行为,可称之为A1.Agent[H]。人工生命的研究对象是行为,A1.Agent的基本工作原理则是“感知引导行为”,不同的应用可以设计不同的A1.Agent,但它们的基本组成都包括感知器、行为发生器、意识发生器和知识库四部分。感知器感知环境变化,引发相应的行为驱动意识,意识发生器再根据产生的意识驱动相应的功能行为,系统根据自身知识推理决策,行为发生器负责产生适当的行为,其基本结构如图2所示。
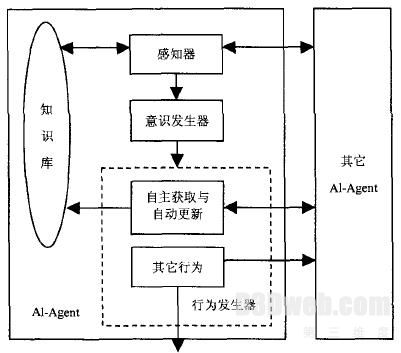
图2 AI-Agent基本结构模型
2.3 MAS与DEVS的联合
MAS和DEVS的应用通常是相对独立的,各有其特征和局限性,但两者都具有“由底向上”的设计特点,Agent~准确地描述复杂系统中各主体的特性和自主行为,但实现复杂,效率较低,而DEVS建模实现简单,仿真效率高,但难以体现主体的个体差异。若将系统划分为以主体为主的基本单元及以内外部环境为主的基础环境,分别采用上述两种建模工具进行建模,则正好利用了它们的优势。以DEVS建模为框架和基础,将Agent~『入其离散网格空间中,使MAS按照自身的智能行为模型去改变网格空间中相应位置的状态,协调器负责管理各个Agent的状态,并协调相互间的通信,其基本结构如图3所示。
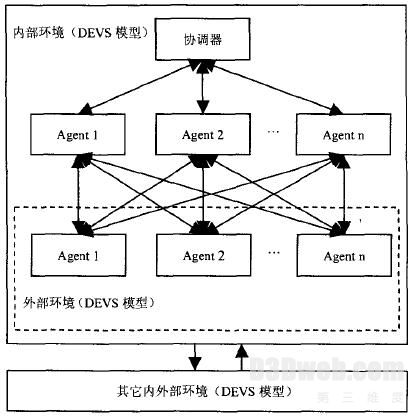
图3 MAS与DEVS联合的基本结构
MAS与DEVS建模的结合,使得系统保留了离散事件的基本框架和特点,又能通过Agent反映各主体的自主特性和个体差异,而且由于Agent处于网格空间中,不必考虑在单纯基于Agent的仿真中必不可少且计算量巨大的Agentf~协调和通信,从而提高了运行效率,因此,这种分工合作的方式可以达到较好的仿真效果和效率。
2.4 DEVS与HLA/RTI的联合
目前大多数DEVS与HLA/RTI的联合形式,其出发点是让DEVS借助HLA/RTI实现分布式DEVS建模与仿真。这些方法没有完全考虑基于HLA/RTI的协同仿真建模需求。因此将这些方法直接用于基于HLA/RTI的协同仿真系统存在一些问题。为了将DEVS转换为HLA联邦成员模型,需要将模型接口映射为HLA的数据对象,即将HLA看作软总线,采用总线映射关系将DEVS耦合模型中捕述的一对一连接关系替换为HLA联邦成员间经常存在的多对多连接关系【n]。
DEVS与HLA/RTI的联合需要将所有的协同仿真模型实现为HLA联邦成员,由于每个联邦成员高层模型均是DEVS模型, 这就需要一个DEVS引擎来运行DEVS模型。为了使DEVS模型问经由HLA/RTI进行事件同步和数据交互,还需要一个HLA DEVS适配器,负责DEVS模型与HLA/RTI的交互,实现DEVS模型问的互操作。这就构成了一种全新的协同仿真运行环境框架(如图4所示),可将高层模型转换为联邦成员。
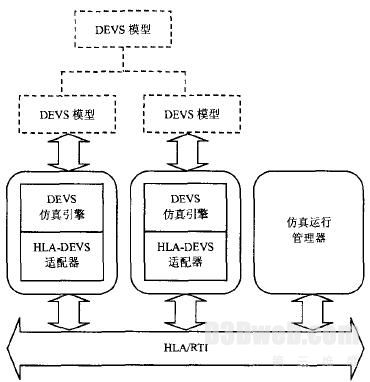
图4 DEVS与HLA/RTI协同仿真运行环境框架
3 仿真建模技术的整体联合框架
上述的各种局部联合策略为实现HLA/RTI、人工生命MAS、DEVS等仿真建模框架、方法与工具问的有机融合提供了思路,也为创建一种基于HLA/RTI的新型联合仿真建模技术框架创造了条件。基本方案如下:以HLA/RTI为整个仿真建模的高层软件体系框架(即软总线);以DEVS为系统仿真的基础环境建模,它与HLA/RTII'~通过DEVS仿真引擎及HLA.DEVS适配器进行联合;在基础环境之上,将系统中的各基本单元及其相互作用,以人工生命与MAS结合的方式建立A1.Agent模型,构建多A1.Agent系统;将各个A1.Agent引入DEVS模型的离散网格空间中,使其按照自身的人工生命智能行为动态改变状态,并利用协调器管NA1.AgentIN通信;HLA/RTI与多Al—Agent系统问通过RTI—Agem适配器进行协作;系统中同步启动仿真运行管理器负责所有部件的组织、调度与管理。总体技术框架如图5所示。

图5 联合仿真建模的总体技术框架
4 军事后勤保障仿真建模的应用实例
军事后勤保障是指通过筹划和运用人力、物力、财力,从物质和技术上保障军事需要的行为和措施。按其功能划分,包括战勤、油料、卫生等多个业务领域,既相互影响又密切协作,还同时受战场、气候、地理等内外部环境因素的制约,并由此构成一个复杂系统。
4.1基础环境建模
将整个军事后勤保障的基础环境看作一个HLA仿真联邦,其根模型为一个改造后的DEVS耦合模型,用于描述成员模型间多对多的数据交互关系。基础环境中的每个子类看作一个联邦成员,根据复杂程度对应一个DEVS原子模型或耦合模型,包括战争态势、友邻敌情、交通环境、气候变化、地理位置等。由于DEVS模型规范中的耦合模型很难描述子模型问复杂的相互调用关系(如条件判断,循环,递归等),因此使用DEVS模型树进行建模时,不适合过于细化,应尽量将模块间复杂的逻辑关系封装到单个原子模型内部,并由状态转移函数来实现。同时,联邦成员的内部模型可采用并行DEVS原子模型。
4.2 基本单元建模
军事后勤保障中的主要业务逻辑,包括战勤指挥、油料勤务、卫生勤务、基建营房勤务、军需勤务、军交勤务、仓储勤务等,共同构成了系统建模的基本单元,并以建立各自的勤务A1一Agent模型的方式来实现。勤务A1一Agent是人工生命MAS中的核心元素,它通过感知器感知基础环境、通过行为发生器作用于基础环境,其行为是主动白发的,具有自己的行动目标和意图,能够根据目标和环境的要求,对自己的短期行为做出规划;能够适应环境的变化;能与其它勤务A1一Agent进行通信、相互协作。在此基础上,应在每个勤务A1.Agent的下层,依据具体业务逻辑建立各种不同小粒度的A1一Agent,如基建营房勤务A1一Agent的下层可建立野营保障A1一Agent和工程保障A1一Agent,而野营保障A1一Agent的下层还可建立宿营保障A1一Agent、供水保障A1一Agent、供电保障A1一Agent、采暖保障A1一Agent等。各A1一Agent之间相互影响、互协作,在后勤保障过程中形成协同交互的A1一Agent~J。
4.3 模型联合
模型联合始终运行于HLA/RTI高层软件体系框架中,通信、调度、控制等机制如图507示,这里不赘述。以DEVS建模产生的军事后勤保障基础环境模型为基础,在DEVS原子模型基础上,建立若干离散网格空间,每个空间内部具有描述环境逻辑关系的状态转移函数;以人工生命MAS建模产生的军事后勤保障基本单元模型为核心,将勤务A1一Agent及其下层A1一Agent分别引入离散网格空间中,并结合自身的智能行为模型动态改变网格空间状态。军事后勤保障仿真建模总体结构如图6所示。
4.4 模型分析
与单纯基于HLA/RTI、MAS、离散事件建模技术建立的军事后勤保障仿真模型相比【15-18],模型联合的优点体现为:
(1)综合应用了各种仿真建模技术。每种仿真建模技术都有其优点与局限性,研究军事后勤保障一类的复杂系统建模,综合集成是切实可行的技术路线,经过实验比较、评估分析、改进优化, 以寻求最佳的解决方案;
(2)灵活的动态协作性。军事后勤保障仿真通常是以单一业务逻辑为建模对象,很难描述联勤体制下各业务间的协作及其自身的演化,通过建立多AL,Agent,则为灵活实现各业务问的动态 作提供了可能;
(3)适宜的计算复杂性。基于MAS的仿真建模具有较大的计算复杂性,通过划分建模元素类型,引入DEVS建模,则可在一定程度上减小计算复杂性;
(4)良好的扩展性。军事后勤保障仿真是作战模拟的组成部分,要求与其它作战模型间具有良好的接口,通过基于HLA/RTI的模型联合,正好为不同模型对象问的通信与交互提供统一平台,保证了扩展能力。
5 结论
本文针对复杂系统仿真建模中存在的分布式交互、协同性及动态性等问题,分析了HLA/RTI、人工生命MAS、DEVS等仿真建模技术,分别着重研究了HLA/RTI与MAs、人工生命与MAS、MAS与DEVS、DEVS与HLA/RTI间的联合策略,并在此基础上,提出了一种基于HLA/RTI的人工生命MAS/DEVS联合仿真建模技术框架,最后给出了该框架在军事后勤保障仿真建模中的应用实例。
这种联合仿真建模技术框架既能充分发挥现有技术的优势,又在联合 作的基础上克服了单一技术应用的缺陷,特别适合于复杂系统的仿真建模,具有理论与实践参考价值。日前,研究工作已基本完成了理论框架设计与概念建模应用,今后应存进~步细化联合技术的基础上,完成原型系统开发,并应用于建模实践。
参考文献:
f1] 李宏亮,党岗,程华,等.复杂自适应系统的描述及其分布仿真框架_J_.计算机研究与发展,2002,39(10):1349,l354.
[2] Alexandros Moukas, Pattie Maes. Amalthaea: An EvolvingM ulti-Agent Information Filtering and Discovery System for thewww [J】. Autonomous Agents and Multi—Agent Systems(Sl387-2532),1998,l(1):59-88.
[3] 余有明,刘玉树,阎光伟作战模拟的人工生命多智能体建模[J】_计算机工程与应用,2005,41(35):193.196.
[4] Gary Kratkiewicz,Amelia Fedyk,Daniel Cerys.Integrating aDistributed Agent—Based Simulation into an HLA Federation[EB/OL](2004—3)[2007-3].htp://ms.ie.org/SIW—LOG/siw—log biNiography.shtml,SIW Logistics an d Enterprise M odels Forum.
[5] 高志年,邢汉承.基于HLA的多Agent系统体系结构研究[J】.小型微型计算机系统,2003,24(3):336 339.
[6] 侯锋,陈洪辉,罗雪山.基于多Agent的C ISR系统建模与仿真方法研究【J】.光电技术应用,2004,19(3):25,30
[7] Gabriel Wainer,Rami Madhoun.Creating Spatially-Shaped DefenseModels Using DEVS and Cell—DEVS [J】_Journal of DefenseM odeling an d Simulation:Applications,Methodology,Technology(Sl22l-32l4),2005,2(3):12l-l43.
[8] 韩守鹏,姚新宇,黄柯棣.基于DEVS的通用数据驱动实时仿真环境[J】.系统仿真学报,2006,l8(9):2473-2476.(HAN Shoupeng,YAO Xinyu, HUANG Kedi. Data Driven General Real TimeSimulation Environment Based on DEVS【J].Journal of SystemSimulation,2006,l 8(9):2473—2476.)
[9] 杨青生,黎夏基于动态约束的元胞自动机与复杂城市系统的模拟[J】l地理与地理信息科学,2006,22(5):l0.15.
[10]B P Zeigler,George Ball,Hyup Cho,el a1.The DEVS/HLADistributed Simulation Environm ent and Its Suppo~ for PredictiveFiltering[c]//Arizona:Advance Simulation Technology Thrust,1 998.
[I1]Jong—Keun Lee,Min-Woo Lee,Sung-Do Chi DEVS/HLA-BasedModeling and Simulation for Intelligent Transportation Systems【Jj.Simulation(S0037—5497),2003,79(8):423-439.
[12]郭斌,范文慧,熊光塄.基于HLA/DEVS 的协同仿真高层建模研究[JJ.系统仿真学报,2006,l8(8):2l74.2l78.(GUO Bin,FANWenhui,XIONG Guan gleng.Research of HLA/DEVS-based HighLevel Modeling for Collaborative Simulation 【Jj.Journal SystemSimulation,2006,1 8(8):2 l 74-2 l 78.)
[13]陈森发.复杂系统建模理论与方法[M] 南京:东南大学出版社,2005,36—39.
[14]王梅蓉,曾广平,涂序彦.多库协同中的AI.Agents研究[J]l计算机应用,2004,24f6 :78—79
[15]朱卫锋,费奇,张金隆.敏捷后勤系统的分布式仿真体系结构I J】.系统工程与电子技术,2007,29(2):230 233.
[16]樊荣,周庆忠,刘云,等.基于多Agent的军队油库仿真作业框架研究【JJ.计算机仿真,2006,23(5):272.275.
[17]朱卫锋,费奇.敏捷后勤仿真系统设计与实现r J】l计算机仿真,2003,20(6):4-7.
[18]杨西龙,陈瑶,曹长修,等.战时军事物流仿真研究I J】.系统仿真学报,2005,1 7(9):2070-2074.(YAN G Xilong,CHEN Yao,CAOChangxiu.Simulation Research of Wartime Military Logistics[J1.Journal of System Simulation,2005,1 7(9):2070.2074.)

