


海上搜救模拟器的直升机悬停鲁棒控制

来源:第三维度
作者: 张显库,尹勇,金一丞
单位: 大连海事大学, 辽宁 大连
摘要: 为了研制海上搜救模拟器的直升机模拟系统,给出了直升机模拟的系统结构,建立了直升机的悬停数学模型。用镜像映射方法和闭环增益成形算法设计了直升机的悬停鲁棒控制器。用Simulink进行了仿真实验,当直升机处于悬停状态时,系统的输出为输入的18%且抖动频率明显降低,当系统加了0.5 s纯滞后模型摄动后,系统的输出为输入的32%且抖动频率明显降低。仿真结果显示系统具有较强的稳定性和鲁棒性。
0 引言
水上救助打捞是水运交通特有的行业,是国家履行国际义务、保障社会稳定、促进经济发展、保障海洋运输安全以及维护国家声誉的一项重要社会职责。我国是国际海事组织A类理事国,是《1974年国际水上人命安全公约》和《1979年国际水上搜寻救助公约》的缔约国,“保证对任何水上遇险人员提供搜寻救助服务”、“配备与其任务相适应的搜寻救助设施和设备”、“建立救助协调中心和分中心”是每一个缔约国的国际义务。
我国的海上安全问题形势严峻。近年来(2003.6~2006.6),中国海上搜救中心及全国各级海上搜救中心共组织、协调海上搜救行动4437次,救助44652人,救助船舶2433艘次;而且大型客船、容滚船、液化气船、危险品船和原油船发生事故的概率呈上升趋势,这些船舶发生海难,社会影响极大,甚至造成重大国际影响[1]。
由于海上遇险局面是不可能通过实船进行真实再现的,从而加大了海上搜救训练的难度。众所周知,进行搜救演习可以在某种程度上,提高搜救指挥能力和及时应变能力,但耗费大量的人力、物力和财力,通过在搜救模拟器上进行搜救科目的训练和演练,同样可以达到预期的效果。采用当今先进的技术手段和方法,如计算机成像技术、虚拟现实技术、无缝拼接宽视场角环幕投影技术、雷达跟踪监控技术以及移动视频通信技术研制海上搜救模拟器,可设置各种遇险情况,可将遇险事故现场、搜救船舶及直升机等三维视景动态、逼真地展现在搜救人员面前,系统可模拟不同船型、搜救直升机模型、设置不同海面紧急情况和遇险种类、配备可给人以高度沉浸感的虚拟环境系统,从而可以以较小的成本获取较大的经济和社会效益,为有效地解决我国海上搜救面临的难题提供一个有效途径。系统同时提供一个很好的软硬件平台,可更好地为海上搜救部门、港航企业利用模拟器进行海难事故重现、海上搜救仿真研究、海空立体模拟演练、港口工程方案论证,有利于提高海上搜救各部门紧急情况下的应变能力和协调搜救能力,通过充分学习和借鉴先进的海上救生技术,加强经验交流,锻炼海上搜救队伍。通过海上搜救模拟器可大幅度地减少实际的海上搜救的演习,通过海上搜救模拟器可以几乎不受限制地增加海上搜救演习的次数,从而可用来检验我国制定的海上搜救应急预案,同时增强有关要投入到搜救的相关单位之间的协调性以及现场施救人员的专业素质。
目前,国际上航海模拟器的发展趋势是将不同的模拟器,例如:船舶操纵模拟器、轮机模拟器、GMDSS模拟器、装卸模拟器等,组合为一个具有综合功能的模拟系统。海上搜救模拟器实际上是一种具有海上搜救功能的综合模拟系统。国外如英国的船商公司、RACAL-DECCA公司、丹麦Lyngso-VAMLET Marine公司、美国的Sperry公司等都开展了相关的研究,但到目前为止,还没有一个综合的海上搜救模拟器投入商业化运作。国内相关的研究才刚刚起步,目前仅仅是大连海事大学在开展前期研究工作。2005年大连海事大学获得国家973子项目的支持,开展海上搜救模拟器的研究,2006年12月交通部批复投资1870万元资助大连海事大学海上搜救模拟器的研究项目。本文给出海上搜救模拟器的直升机悬停鲁棒控制研究结果。
1 系统结构
为实现交通行业要创建成创新性行业的目标,我们自行研制海上搜救模拟器,其优点为:
(1)通过该系统的研制,掌握具有自主知识产权的关键技术,在研制的过程中可取得一批科技创新成果;
(2)通过自己研制可培养自己的研究队伍及高级人才;
(3)因为关键技术自己研制,可以节约经费;
(4)打破少数国家的垄断地位,增强我国的科技竞争能力。
本研究的前期研究基础为大型航海模拟器[2],该项目于2000获得辽宁省科技进步一等奖,该项目目前已经推广应用于国内10多家港航企业及大学,取得了良好的社会和经济效益。研究的高品质航海模拟器于2005年出口到新加坡海军,并于2006年11月通过挪威船级社的DNV国际认证,这是我国相关领域的科研成果第一个被国际权威组织认证,认证等级为A级(最高级)。在船舶操纵模拟器、GMDSS模拟器研究成果的基础上,购买一些基本设备,融入更多虚拟现实的最新成果和系统涉及到的其他先进技术,自行研制一套功能完备的海上搜救模拟器。海上搜救模拟器主要由以下几部分组成:教练员站1套;搜救协调中心1套;主本船1条;副本船 2条;视频监控系统1套;直升机模拟单元1套,各部分采用HLA结构并通过LAN/WAN连接,HLA是用于产生计算机模型或仿真系统的软件体系结构,它就像一种黏合剂,能将多个小的计算机仿真系统联合成为一个巨大的仿真系统。系统框图如1所示。
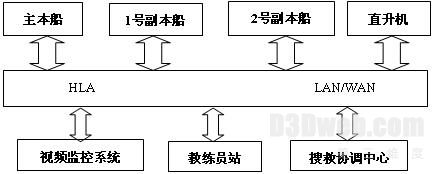
图1 系统框图
Fig.1 System configuration
(1)教练员站
除具有船舶操纵模拟器中教练员站的各项功能之外,还具有GMDSS系统中的搜救协调中心(RCC)的指挥协调、搜救资源查询、中国船舶报告(局部)、遇险现场事故再现以及海洋气象查询等搜救支持系统功能。
教练员站可以设置各种搜救科目,比如:险情处理、旅客转移、弃船逃生、搜寻救助、直升机悬停救人、消防灭火、防污清污等。
根据本系统的训练目的,教练员站不仅可以设置各种情况下的险情模拟,比如:碰撞、失火、爆炸、沉没、搁浅、自然灾难等,还可以设置人员的求生方式,如人员自然落水、人+救生圈、人+小艇、人+救生筏等,系统根据设置的风浪流等天气情况实时计算落水人员的位置等,从而实现海上漂浮物的仿真。
(2)主本船
360视场角柱幕投影视景系统,电子海图、雷达图像模拟、航行综合信息显示等功能。
(3)副本船
180视场角柱幕投影视景,配备立体显示设备,增强深度感。
主本船和副本船可根据训练目的方便地设置为救助船或遇险船。
(4)视频监控系统
用可视电话(或摄像机)形成电视监控系统,实现搜救事发现场的可视化传输功能。
(5)直升机模拟器
考虑到直升机在搜救中的特殊作用,直升机单元采用五个面的CAVE系统(正面、左面、右面、底面、顶面),立体显示。CAVE系统是一个具有高度沉浸感的虚拟环境,系统利用高性能图形设备和高分辨率的投影设备,设计出一种基于投影的无障碍式、融真实世界与虚拟世界于一体的虚拟环境。CAVE的可视化环境是由包围着观察者的投影面(前、左、右、底、顶)组成的四方空间。观察者置身其中只需配备轻便的立体眼镜和头部跟踪器就能感受到投影图像充满着空间。随着观察者在此空间的漫游,观察者可以观察到周围“环境”的动态变化,给人以极真实的沉浸感。船舶与直升机在雷达图像和三维视景上互见。
图2为直升机模拟单元系统构成。直升机模拟单元的主要设备包括:5面投影主动立体显示CAVE系统、直升机模拟驾驶舱、直升机模拟控制设备和直升机动力学模型。
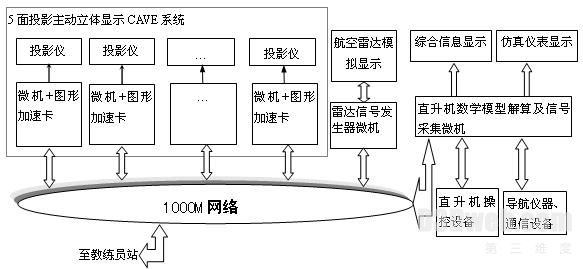
图2 直升机模拟器系统构成
Fig.2 System configuration for helicopter simulating
2 直升机悬停的鲁棒控制器设计
直升机是海上搜救的重要工具,其机动性和灵活性得到了充分的应用,但其并不像固定翼飞机那样稳定,是一个不稳定的系统,控制起来较为困难。直升飞机的悬停控制对于海上搜救工作来说至关重要,如果悬停控制得不稳,将直接影响救人或救助物资的运输。直升飞机在悬停状态时,其自身的动力学特性使得其数学模型表现为非最小相位或不稳定或同时包含有这2种情况[3],这就给直升飞机的悬停控制系统的设计带来困难。H鲁棒控制理论的提出解决了频域中MIMO系统鲁棒控制器设计问题,其计算复杂的缺点已因计算机技术的飞速发展及标准的软件开发工具箱的出现得到克服,故近十多年来已成为控制理论的一个热点研究领域。H鲁棒控制理论的演绎需要艰深的数学基础,在它的发展历史中吸引了众多的数学家开展了创造性的工作,故而使得这种控制理论以其严谨和普适的风格形成控制论的一个独特的分枝。但是,在用H鲁棒控制理论求解非稳定过程的鲁棒控制器时,即使应用特定的软件包也需要在艰深的数学基础上进行大量的实验选择权函数,往往选择一组能求解出稳定控制器的权函数非常困难,求解过程复杂[4]。本研究基于非稳定过程的奇异值曲线与其对应于虚轴的镜像映射的稳定过程的奇异值曲线相同或相近的原理,采用闭环增益成形算法[4]对直升飞机这一不稳定过程经镜像映射的稳定过程求解鲁棒控制器,因闭环增益成形方法直接根据鲁棒性能指标的奇异值曲线形状用闭环系统具有工程意义的闭环传递函数(或补灵敏度函数)的最大奇异值、带宽频率、关门斜率及闭环频谱峰值四大参数构造出鲁棒控制器,属于图形求解方法,故该控制器对非稳定过程同样具有鲁棒性。该方法通过镜像映射获得非稳定过程的奇异值曲线相同的稳定过程,用间接方法取代直接的鲁棒控制器求解方法,求解过程异常简单,工程意义明确,设计的控制器阶次较低,具有控制性能和鲁棒稳定性良好的特点。
2.1 直升飞机的悬停数学模型[3]
在直升飞机进行高增益飞行控制系统设计时,一般需采用含有旋翼动力学的准静态假设下的小扰动线性模型,这种模型经过简化后由机体和旋翼挥舞模型2部分组成。
跷板式旋翼直升飞机AH-1G悬停状态的数学模型 为
 (1)
(1)
式中 为俯仰角, 是桨毂倾斜盘的纵向倾斜角。式(1)由3部分组成,第一部分为机体模型,为不稳定性的主要来源;第二部分为纵向挥舞模型,是稳定的;第三部分为旋翼模型,也是稳定的,一般情况可忽略。式(1)中的负号只表明操纵极性而不影响设计,可以略去,故简化后的模型为
 (2)
(2)
2.2 直升飞机的悬停鲁棒控制
运用镜像映射方法和闭环增益成形算法相结合进行直升飞机的悬停鲁棒控制。
将式(2)的不稳定零极点换成其稳定零极点的镜像映射模型为[4]
 (3)
(3)
设闭环系统的带宽频率为 ,则由二阶闭环增益成形算法[4-7]知:
 ,
,
将式(3)的数学模型代入并取闭环频谱的带宽频率为2 rad/s(  ),得
),得
 (4)
(4)
这是一个4阶的稳定控制器。
用Matlab的Simulink对直升飞机的悬停进行仿真研究,用式(4)控制式(2)的模型,为了描述悬停状态,设定信号不能直接设为0,代之以标准的白噪声信号,其输出响应如图3所示,图中较深曲线为设定输入信号,中间较浅曲线为控制的输出曲线,从图中可以看出,设定信号最大值为4,平均为0,经过鲁棒控制后,系统的输出最大值为0.71,均值为0,而且直升飞机的抖动频率明显降低,稳定性增强。为了验证控制器的鲁棒性,图4给出了摄动模型的控制效果,这相当于在原名义模型的基础上加了一个时间常数为0.5 s的纯滞后环节,从仿真结果可以看出,系统的输出由原最大值4(深色曲线)降为1.27(中间浅色曲线),控制性能稍微下降,但仍然稳定,而且直升飞机的抖动频率明显降低,这说明所设计的控制器具有一定的鲁棒性。
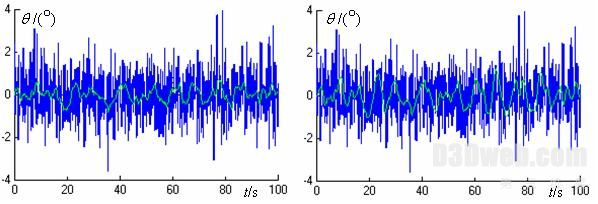
图3 名义模型的控制效果 图4 摄动模型的控制效果
Fig.3 Control effects of nominal model Fig.4 Control effects of perturbed model
文献[3]采用了Horowitz提出的解决非最小相位且不稳定对象控制器设计问题的“平衡”设计方法设计了直升飞机的悬停鲁棒控制器,取得了较好的控制效果,但所设计的控制器为不稳定的,且存在一定的稳态误差。本文所给出的用镜像映射方法和闭环增益成形算法相结合的设计方法较好地解决了这两个问题。
文献[3]给出的直升飞机悬停数学模型只考虑了纵向—俯仰运动,文献[8]则给出了直升飞机悬停时考虑了纵向、横侧向—俯仰、横滚运动的数学模型。文献[8]提出了一种图形化多回路控制律鲁棒选参方法,将针对闭环系统的指标要求直接映射到增益参数平面,从而以直观的形式实现面向ADS-33E品质规范的控制律鲁棒参数设计,取得了较好的效果。后续的研究可采用该复杂的直升机数学模型。
3 结 语
本文首先论述了研制海上搜救模拟器的意义,然后给出了海上搜救模拟器和直升机模拟的系统结构,建立了直升机的悬停数学模型,用镜像映射方法和闭环增益成形算法设计了直升机的悬停鲁棒控制器。用Matlab的Simulink进行了仿真实验,当直升机处于悬停状态时,系统的输出为输入的18%且抖动频率明显降低,当系统加了0.5 s纯滞后模型摄动后,系统的输出为输入的32%且抖动频率明显降低。仿真结果显示系统具有较强的稳定性和鲁棒性。本研究所设计的控制器为4阶稳定的控制器,为研制海上搜救模拟器的直升机模拟系统奠定了理论基础。
参考文献:
References:
[1]金一丞,尹勇,张显库. 海上搜救模拟器建设项目工程可行性及初步设计研究报告[R].大连:大连海事大学,2006.
Jin Yi-cheng, Yin Yong, Zhang Xian-ku. Engineering feasibility and primary design research reports for marine search and rescue simulator[R]. Dalian: Dalian Maritime University, 2006.
[2]张显库, 金一丞. 控制系统建模与数字仿真[M]. 大连:大连海事大学出版社, 2004.
Zhang Xian-ku, Jin Yi-cheng. Modeling and digital simulation for control system[M]. Dalian: Dalian Maritime University Press, 2004.
[4]张显库,贾欣乐. 船舶运动控制[M].北京:国防工业出版社, 2006.
Zhang Xian-ku, Jia Xin-le. Ship motion control[M]. Beijing: National Defense Industry Press, 2006.
[5]张显库, 杨盐生, 郭晨. 舵鳍联合减摇的鲁棒控制系统[J]. 交通运输工程学报, 2006,6(4):71-74.
Zhang Xian-ku, Yang Yan-sheng, Guo Chen. Integrated robust control system of rudder and fin[J]. Journal of Traffic and Transportation Engineering, 2006,6(4):71-74. (in Chinese)
[6]张显库. 离散型闭环增益成形算法及其应用[J]. 中国航海. 2006, 42(3): 4-6,26.
Zhang Xian-Ku. Discrete closed-loop gain shaping algorithm and its application[J]. Navigation of China, 2006, 42(3): 4-6,26. (in Chinese)
[7]张显库, 郭晨, 杜佳璐. 船舶航向不对称信息理论与非线性逆推鲁棒控制算法[J].交通运输工程学报, 2006,6(2):47-50.
Zhang Xian-ku, Guo Chen, Du Jia-lu. Asymmetric information theory and nonlinear backstepping robust control algorithm of ship navigation[J]. Journal of Traffic and Transportation Engineering, 2006,6(2):47-50. (in Chinese)
[8]杨晖.一种图形化多回路直升机控制律鲁棒选参方法[J].系统仿真学报,2006,18(6): 1532-1534.
Yang Hui. A graphic robust parameter selection method for rotorcraft multiloop control law design[J]. Journal of System Simulation, 2006,18(6): 1532-1534. (in Chinese)

