


InterSense IS-1200 VisTracker InertiaCam 光学惯性动作跟踪系统

InterSense IS-1200为机动或自主跟踪提供6自由度广域、光学惯性的自跟踪系统,适用于仿真&训练、扩展虚拟混合现实系统,以及遥控航行等应用领域。IS-1200采用USB或RS-232接口,支持windows操作系统,需安装InterSense SensorFusion Server软件。同时交付的还有windows配置&测试软件,用于输出跟踪基准信息及设置跟踪环境。
IS-1200产品系基于先进的图像处理和传感器联合技术,是InterSense为您提供的最先进、精度最高的动作跟踪产品。
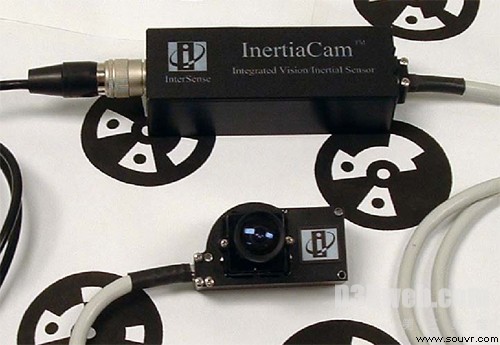
IS-1200 VisTracker最初的定位是一款视觉惯性自跟踪系统,适用于移动及增强现实应用领域,可满足最为苛刻的跟踪要求。InertiaCam的核心由六个MEMS惯性传感器和一个内置“智能相机”组成,可通过被动参照基准标记物提供出连续的位置参考。该产品是一款高精度6自由度跟踪解决方案,且无需装配任何主动式光学元件。

全新的IS-1200 VisTracker广域惯性光学运动跟踪系统将移动增强现实应用提升到了前所未有的更高水平。该产品为全自动设计,用户可以使用移动计算平台对物体或人进行跟踪,跟踪范围和一栋楼房面积相同,跟踪精度符合混合现实及增强现实系统要求。IS-1200 VisTracker™功能十分强大,但外型设计小巧精致,且坚固耐用,适合移动计算平台使用,具有跟踪区域大、精度高等特点。该产品的主要优势包括:
完美的移动功能
产品外形设计小巧、功耗低,具有良好的移动性,且节约能源,延长了电池寿命。我们独特的被动式跟踪参考晶格(参考基准点)将跟踪区域趋于无限,从单个房间到多个房间,以至整栋建筑物,都可以轻松应对。VisTracker的电源和接口可与用户移动计算机的USB端口连接,无需配备额外的电源。
前所未有的超高性能
全新的先进传感器融合算法,加上嵌入式Blackfin DSP,可确保准确、高效跟踪。用户可以使用自己的移动平台来完成普通光学系统无法实现的动作跟踪任务。
使用简便
VisTracker让您的生活变得更加简单。用户在操作过程中不需要进行校准。此外,本产品在不同自然光条件和亮度下均可正常运行。
耐用可靠
VisTracker能够适应不同的挑战性极强的恶劣使用环境。该产品针对工业环境而设计,精加工铝制外壳坚固耐用,可将环境中的污染物完全隔离,保护了内部的精密光学仪器和和电子部件。
内置新型InertiaCam
VisTracker系统的核心是新型的高分辨率光学惯性传感器,可让用户追踪更远的距离,且参考基准点更小、更少。全新的简洁设计融惯性传感器、照相组件、以及图像处理器于一体,组成了这款小巧精悍的专业设备。
InertiaCam可让您追踪更远的距离,基准点更小、更少。
系统组成
技术特征
应用范围
适用于仿真、训练、扩展虚拟混合现实系统、遥控航行、移动及增强现实等应用领域。
| 规格 | InterSense IS-1200 VisTracker InertiaCam光学 动作跟踪系统 |
| 自由度: |
6 (偏航、俯仰、滚动、X、Y和Z轴) |
| 最大角速度: | 1000° per second |
| 镜头视野 (FOV): | 85° |
| 最大线性加速度: | 4.0 G |
| 方向精度 (高分辨率选项): | 0.1° RMS |
| 方向精度 (标准分辨率选项): | 0.2 ° RMS |
| 位置精度 (高分辨率选项): | 2 - 5 mm RMS |
| 位置精度 (标准分辨率选项): | 5 - 8 mm RMS |
| 最大跟踪范围 (标准分辨率选项): | 基准直径的20倍 |
| 最大跟踪范围 (高分辨率选项): | 基准直径的40倍 |
| 延时 (RS-232和RS-422接口): | 典型的为1~2ms (预测补偿关闭) |
| 延时 (USB接口): | 5~8ms (预测补偿关闭) |
| 预测补偿: |
0~50毫秒可调 |
| 最佳跟踪基准: | 与InertiaCam两米的距离,每平方米1至2个基准点 |
| 最小跟踪基准: | 与InertiaCam两米的距离,0.5每平方米 |
| 最高InertiaCams: | 基准点设定,跟踪范围趋于无限 |
| InertiaCam的输入/输出至Windows电脑: | USB接口 (总线供电) 或RS - 232 (外部供电) |
| SFServer软件输入/输出: | 共享内存或内部以太网 |
| 更新率: | 180赫兹 |
| 主机兼容性: | 适用SFServer的Windows PC机 (2000/XP) Windows、Linux、IRIX或Mac OS X,如果使用可选的穿戴式传感器融合处理器 |
| 支持软件: | 被动式基准规划和印刷程序 增强现实安装、测试、和演示程序 |
| InertiaCam接口: | RS-422和RS-232或USB适配器 |
| Inertial感应核心: | 6轴MEMS惯性测量装置 |
| 图像传感器: | 1280×1024单色CMOS |
| 尺寸: | 47.7mm×29.4mm×25.8mm,不带镜头 |
| InterSense库支持: | Windows 98/2k/NT/XP需要DLL 以及Linux和SGI IRIX Mac OS X需要dylib |
>>相关产品

