


Immersion CyberGrasp 数据手套

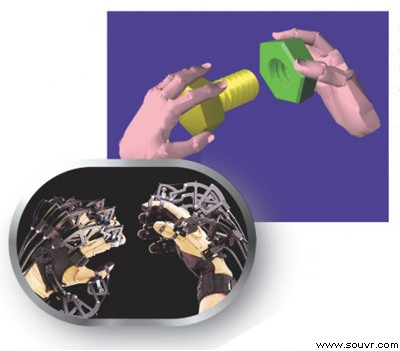
CyberGrasp是一款设计轻巧而且有力反馈功能的装置,像是盔甲一般的附在Cyberglove上。使用者可以通过CyberGrasp的力反馈系统去触摸电脑内所呈现的3D虚拟影像,感觉就像触碰到真实的东西一样。
CyberGrasp是一款设计轻巧而且有力反馈功能的装置,像是盔甲一般的附在Cyberglove上。使用者可以通过CyberGrasp的力反馈系统去触摸电脑内所呈现的3D虚拟影像,感觉就像触碰到真实的东西一样。
该产品重量很轻,可以作为力反应外骨骼佩戴在Cyberglove数据手套(有线型)上使用,能够为每根手指添加阻力反馈。使用CyberGrasp力反馈系统,用户能够真实感受到虚拟世界中电脑3D物体的真实尺寸和形状。
接触3D虚拟物体所产生的感应信号会通过CyberGrasp特殊的机械装置而产生了真实的接触力,让使用者的手不会因为穿透虚拟的物件而破坏了虚拟实境的真实感。护套内的感应线路是特别为了细微的压力以及摩擦力而设计的,而5支手指上的马达则是采用高质量的DC马达。
使用者手部用力时,力量会通过外骨骼传导至与指尖相连的肌腱。一共有五个驱动器,每根手指一个,分别进行单独设置,可避免使用者手指触摸不到虚拟物体或对虚拟物体造成损坏。高带宽驱动器位于小型驱动器模块内,可放置在桌面上使用。此外,由于CyberGrasp系统不提供接地力,所以驱动器模块可以与GrapPack连接使用,具有良好的便携性,极大地扩大了有效的工作区。
该装置施加遍及运动范围的大约垂直于指尖的抓取力和可以单独指定的力。CyberGrasp系统可使手部在整个运动范围内运动,但并不妨碍佩戴者的动作。该装置是完全可调的,其设计的目的是适应各种各样的手。
在用力过程中,设备发力始终与手指垂直,而且每根手指的力均可以单独设定。CyberGrasp系统可以完成整手的全方位动作,不会影响佩戴者的运动。我公司可根据不同使用者手型的特点进行产品调整和定制设计。
CyberGrasp最初是为了美国海军的远程机器人专项合同进行研发的,可以对远处的机械手臂进行控制,并真实地感觉到被触碰的物体。
CyberGrasp系统为“真实世界”的应用带来巨大的利益,包括医疗、虚拟现实培训和仿真、计算机辅助设计(CAD)和危险物料的遥操作。
CyberGrasp系统可以产生各种不同的精确动作,而且不让穿戴者的动作受到任何阻碍,具有延展性,适用于任何尺寸大小。
| 规格 | Cyberglove CyberGrasp |
| 作用力: | 每根手指12牛顿(最大,连续) |
| 重量: | 450克(仅外骨骼,不含Cyberglove系统) |
| 工作空间: | 驱动器模块1米半径内 |
| 仪表组: | 包含一个力控制装置和一个驱动器模块 |
| 接口: | 以太网 |
|
建议使用CyberForce机器人电枢 | |
>>相关产品

