


基于虚拟现实技术的船舶辅锅炉控制系统研究

结合实船燃油辅锅炉的实际情况和具体操作要求,通过建立维模型、人机交互、Web 3D网页浏览技术等米构建船舶辅锅炉虚拟操控系统,达到以虚拟操作代替实际操作,节省开支、实现远程培训、以及人机交互的目的,克服了船舶辅锅炉控制系统实际训练中不可避免的资源消耗、维护费用高等难题。
辅锅炉是船舶动力装置中的重要组成部分其控制的可靠性和经济性对保证船舶安全航行有着重要的意义。
船舶辅锅炉是一个多输入、多输出且相互关联的复杂的控制对象,其实际操作必须遵循严格的步骤,在实习和教学环节中,实现每个人都进行实际操作有难度。因燃油运行成本且可能出现操作失误,会给实习和教学带来一定的困难和不安全因素。随着虚拟现实技术的产生,这些问题将逐步得到解决。
1、控制系统的组成
辅锅炉是船舶上最早实现自动控制的装置之一,其控制项目包括:水位自动控制,燃烧自动控制 ,锅炉点火及燃烧 时序 自动控制和 自动安全保护。
1)水位自动控制。控制给水量的多少,使进人锅炉的给水量大致大于锅炉的蒸发量。
在蒸发量比较小、蒸汽压力比较低的船舶辅锅炉中,大部分采用双水位自动控制系统。双水位控制系统指辅锅炉的水位可以在一定范围内波动,辅锅炉水位所允许的变化范围是 60~120 mm。当水位下降到水位下限时,自动起动给水泵 ,给水泵开始向辅锅炉供水,辅锅炉水位就会逐渐升高 ;当给水量达到一定限度,也就是水位上限时,给水泵自动停止工作,不再向辅锅炉供水。
2)燃烧自动控制。被控量是辅锅炉内的蒸汽压力,根据汽压的高低自动改变进入炉膛的喷油量和送风量。
对货船辅锅炉,燃烧自动控制系统的要求简单、可靠,对辅锅炉运行的经济性要求不是很严格,大多数这样的辅锅炉采用汽压的双位控制,少数采用比例控制,并保证辅锅炉在不同负荷下,其送风量基本适应喷油量的要求。在油船辅锅炉中,要求汽压必须稳定,同时对辅锅炉的运行经济性要求比较高,这样辅锅炉才能在不同的负荷情况下,保证有一个最佳的风油比,所以通常采用比例积分控制或更好的控制算法。
3)点火及燃烧时序控制。给锅炉一个起动信号后,按时序的先后进行预扫风、预点火、喷油点火,点火成功后对锅炉进行预热,接着转入正常燃烧的负荷控制阶段,同时对锅炉进行一系列的安全保护。
按下辅锅炉启动按钮后,自动启动燃油泵和鼓风机,关闭燃油电磁阀使燃油在辅锅炉外面循环,此时风门开的最大,以最大风量进行预扫风,防止炉内残存的油气在点火中产生冷爆。
预扫风的时间根据辅锅炉的结构形式不同而异,一般是 20~6O S。达到预扫风的时问后自动关小风门,同时点火电极打出火花进行预点火,时间约为3 S。然后打开燃油电磁阀或开大回油阀,或让一个油头喷油工作,即以小风量和少喷油进行点火。点火成功后,先维持一段 时间低火燃烧,对辅锅炉进行预热,再开大风门关小 回油阀或增加一个油头向炉膛喷油,使辅锅炉转入高火燃烧,即进入正常燃烧的负荷控制阶段。在预定的时间内若点火不成功或风机失压、中间熄火等,会自动停炉,待故障排除后按恢复按钮使时序控制恢复到起动前的状态,方能重新起动辅锅炉 。
2、设计的实现
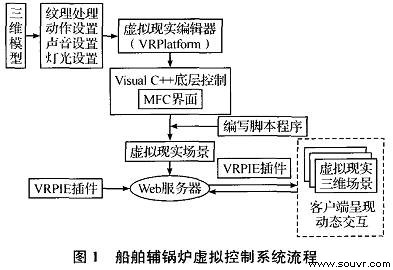
该系统采用 TCP/IP结构,是一个开放 的模块化环境 ,系统 的管理和三维模型 的实时渲染都在 web服务器上运行 ,客户端只要连接到 Internet上的任意一 台计算机,下载一个很小的网页插件就可以遍览该系统。而它的实现方式就是通过网络传输反映三维场景的模型文件,用户根据自己的需求将相应的模型文件下载到客户端,通过网页插件来提供对模型文件的动态实施和实时渲染。方案流程见图 1。
3、三维实体模型的建立
维实体模型是该系统实现漫游和交互的基础,模型的好坏直接影响运行的效果和客户端浏览的逼真度。粗糙 的模型,不能给人视觉上的美感,失去原有实体模型 的真实性;模型建得过细,就会降低场景图形的绘制效率,同时给渲染和计算机的显示带来麻烦,因此建模过程中,平衡模型细节度和复杂度显得尤为重要。
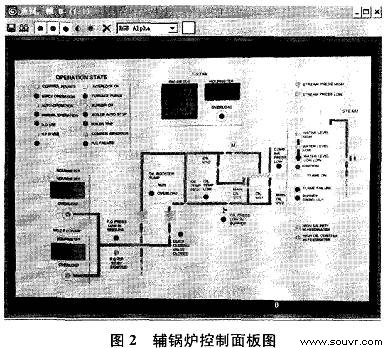
采用 3ds max进行建模。逐级对船舶辅锅炉的组成部分,各组成部分中的零部件进行分割,根据部件的形状和工作特征,选择不同的建模方法,然后把个部件组合成完整的三维场景,最后导入到虚拟编辑器(VRP编辑器),以供底层的程序进行控制,形成一个完整动态模型。图 2为锅炉控制面版 的三维图形。
4、交互功能的实现
在交互功能的实现过程中,首先使用 VisuaC++中的 MFC框架来设计服务器的用户界面根据界面定义的功能,使用网络类作为基类来设计一个专门处理自己窗口通信消息的网络对象通过消息函数(CRemoteTestDlg::()nButtonStartVrp())调入设计的三维场景,通过控件定义相应事件处理函数来驱动三维场景,从而实现对j维场景 中模型的控制 。
在=三维虚拟文件与 H'I’MI 网页结合上采用超链接的方式:在 HTMI 网页中,通过超链 接的设置来实现同维虚拟文件的结合。浏览者可以通过激活超链接来实现网页与虚拟现实场景的转换,双方的平面显示空间不受约束,为场景中的一些重要细节呈现提供更广阔的空间。例如,当用户点击视点切换文本框 中的一个超链接 ,维虚拟场景中的视点就会 自动切换到相对应的场景。 以辅锅炉水位控制算法程序为例说明交互的实现机制 。
水位控制的算法分为水位控制的运动算法和模拟水的行为算法。水位控制的运动算法相对简单 ,根据锅炉的运行状态 ,水位做相应的变化 ,可以匀速上升、匀速下降、加速上升、加速下降以及在某一水平线的波动。模拟水的行为算法是实现水位控制虚拟化的核心,采用四连通的五位区域采样方法,将四连通周围的五个点求平均值;通过引入阻尼系数来模拟水波上升或下降的震动效果,并反映到导航图中;然后通过激活水波使整个水位控制更接近实际,真正达到虚拟仿真的效果以下是模拟水的行为算法的部分程序:
for Y:一1 toM AXY一 ]do again
for x:一 1 to MAXY一 1 do again
xDiff:一Trunc(WaveMapEx+1,y]一WaveMapEx);
yDiff:一Trunc(WaveMapE X,y+1]一WaveMapE xy2);
xAngle:arctan(xDiff);
xRefraction:一aresin(sin(xAngle)/rlndex);
xDisplace:一Trunc(tan(xRefraction) xDiff);
yAngle:arctan(yDiff);
yRefraction:一arcsin(sin(yAngle)/rlndex);
yDisplace:==Trunc(tan(yRefraction) yDiff);
if xDiff<0 then begin//当处在高水位时 ,歼始下降
if yDiff< 0 then
newcolor:==BackgroundImage[X— xDisplace,Y~yDisplace];
else
newcolor:一Backgroundhnage[x x1)isplace,Y+yDisplace];
if yDiff<0 then//当处于低低水位时,开始上升
newcolor:一 Backgroundlmage[x—xI)isplace,Y~yDisplace];
else
newcolor:-_Backgroundlmage[X xI)isplace,Y+yDisplace];Targetlmage[x,y]
end;
end;
5、结束语
从开发高度逼真的船舶辅锅炉系统的实际需要开发,设计出一种纯软件控制系统,在独立的PC机上运行,将船舶辅锅炉控制系统虚拟到计算机上,操作人员调用内存中的船舶辅锅炉操控系统的 维图形 ,(用 鼠标控制浏览方 向)对三维对象进行虚拟控制,利用虚拟现实技术构建虚拟动态设备,仿真出与实际设备相近的运行过程,弥补传统操作流程上真实感的不足。
同时利用虚拟现实技术提供的高速运行环境,能够实现多人远程实时操作和三维模型的浏览和交互动态演示,让操作者与电脑实现人机交互,如同身临其境,达到替代实际现场操作的目的,克服了实际操作的单一性和危险性等缺点,降低了船舶辅锅炉控制系统运行演示的成本以及船舶辅锅炉误操作的影响。
参考文献
[1]费干.船舶辅机[M].大连:大连海事大学出版社,1998.
[2]张力明,卢晓春,叶翠安.基于组态控制船用辅锅炉监控系统的设计与实现[J].船海工程,2008,37(4):55—57.
[3]牛宝来。船舶自动控制系统[M].大连:大连海运学院出版礼 ,1990.
[4]郑凤阁.轮机自动化[M].大连:大连海事大学出版社 ,1998.
>>相关产品

