

基于RT-LAB和JMAG电机驱动的有限元分析

RT-LAB是集成实时计算的平台,一般由一台或多台采用多CPU以及多核技术的高性能计算机组,进行快速控制原型开发和HIL仿真。与MATLAB/Simulink完全兼容,自动生成代码,然后编译,与输入输出连接,最后下载至RT-LAB目标机。
通过RT-LAB模型库提供的自定义模块来配置I/O接口。工程师仅仅需要拖放模块至模型即可,连接输入输出模块与其他模块,不用担心驱动程序。RT-LAB自动生成代码,将模型的数据流直接连接到物理I/O板卡上。
3.2 精确度
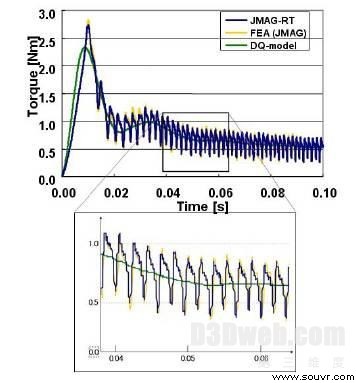

图6个电机模型转矩的比较
为由PWM逆变器控制的三种不同电机模型的转矩示意图。标注“FEA(JMAG)”的曲线为在JMAG里FEM计算得出的转矩结果;标注“JMAG-RT”的曲线为基于RT模型的转矩结果;最后,标注“DQ-model”的曲线是DQ电机模型获得的转矩。从上图可以很明显的看出,DQ电机模型的仿真结果是个近似值,忽略了磁通分布的非线性和电磁场的耦合效应。
3.3 逆变器模型采用TSB
表示A相电流和转矩的各种闭环测试。具体分为:
● 仿真步长为1μs,TSB(带时间戳的电力电子桥)逆变器模型;
● 仿真步长为10μs,TSB逆变器模型;
● 仿真步长20μs,TSB逆变器模型;
● 仿真步长5μs,无TSB的逆变器模型;
以上测试均采用PWM载波频率12.5kHz。
从上述测试可看出,采用时间戳技术,在仿真步长分别为1μs,10μs和20μs时仿真曲线基本是重合的,而不采用时间戳技术的仿真步长为5μs的响应曲线,与前者仿真曲线相比,有很明显的相位滞后。
由此可得,即使对较小仿真步长,实时插值法也是必要的。
进一步的测试显示,当转子速度为3000RPM时,仿真步长为20μs,可得到精确的仿真结果。对于更高的转速,需要更小的仿真步长5μs,并采用TSB逆变器模型;
3.4 实时运行时间
除了JMAG 实时模型方程的精确度外,还有另一更重要的因素——步长影响着实时模型的精度。
表一为RT-LAB仿真机的最小仿真步长;
分两阶段:第一阶段,JMAG-RT模型没有任何优化;第二阶段,对上述模型进行优化改进;此外,在开发阶段,进行如下分割:将有IGBT逆变器(和控制器)的主要电气求解器放到一个处理器上计算,电感矩阵的计算放到其他CPU。
结果表明,完成全数字模型实时仿真的RT-LAB最小仿真步长为12μs,基于双核Opteron仿真机,不带I/O。仿真机通过典型I/O板卡与外部实物控制器相连,进行HIL仿真,如图4所示,最小仿真步长为25μs。
4 结论
本文主要目的在于说明电机设计和测试领域的最新开发进展;展现了如何以合适的步长对有限元电机模型进行HIL实时仿真,凭借设计速度和精确的电机模型,此方法将为电气设备的电机驱动设计填补空白。
在FPGA上直接进行实时仿真将更大的缩短仿真步长,此项研究正在调研和设计阶段。

