基于虚拟现实技术的AMT换挡特性仿真系统

|
以桑塔纳2000型轿车数据为基础,建立了发动机特性数学模型。通过对汽车车速计算、线性2自由度汽车模型稳态响应的建立、离合器分离与接合模型分析、换档规律的计算以及图像模型的建立和处理,设计了机械式自动变速器换档特性仿真系统。系统仿真结果与装有AMT的桑塔纳2000轿车实测数据对比表明,二者基本一致,验证了仿真系统的正确性。 1 前言 2 系统结构 从软件层面上系统可以分为2部分,一是模拟与评价模块,此模块根据OpenGVS 3D实时引擎传递的当前路况信息,按照汽车动力学模型计算出汽车当前的行驶车速和横摆角速度, 同时传递给OpenGVS 3D实时引擎,并记录相关数据; 二是OpenGVS 3D实时图像处理模块,此模块根据模拟与评价模块传递过来的数据,并利用由软件Muhigen Creator和3DMax所构建的各种场景模型(如路面、环境以及汽车等)来实时生成显示场景,同时把当前路况反馈给模拟与评价模块。
3 动力学模型 3.1 发动机特性数学模型
式中, 为发动机瞬态扭矩; 为发动机稳态扭矩; 、 分别为发动机转动惯量、角速度。 3.2 汽车车速计算
同时,因为求解发动机输出扭矩时需要发动机转速,根据汽车理论n 有:
式中,i。为主传动比;ig为不同挡位传动比;r车轮半径; v。为前一采样时刻车速;n为发动机转速。 3.3 线性2自由度汽车模型的稳态响应
式中, 为汽车横摆角速度; 为车速; 为轴距;k为稳定性因数;0为前轮转角。 3.4 离合器分离与接合模型
其数学表达式可用下式表示:
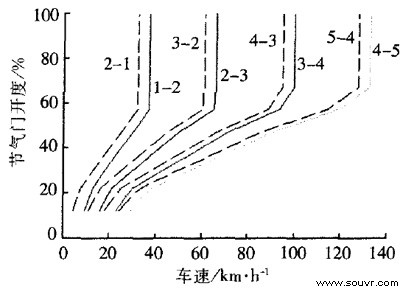
式中, 为分离杠杆自由行程点; . 为分离杠杆完全接合点。通过对装有AMT的桑塔纳2000型轿车所进行的试验【。 可知,其离合器分离阶段耗时200 ms左右,选挡阶段耗时250 ms左右,离合器接合阶段耗时1 050 InS左右,因此整个换挡操作将要耗时1 500 ms左右。假定每阶段分离杠杆的移动速度一定,所以在对离合器扭矩传递建模时,以每个阶段耗时和表达式(5)就可决定离合器传递的扭矩。 3.5 换挡规律计算
4、图像仿真处理 4.1 图像建模 a. 使用了纹理贴图技术,这样可以避免对场景中的每个细节都用复杂的多边形来表示,特别是对汽车不会行驶到的区域。在这个区域不必使用复 b. 使用细节层次技术来构造同一对象。当对象离视点远时使用低细节层次,即用比较少的多边形和分辨率低的贴图文件构造对象;当对象离视点近时使用高细节层次,即用比较多的多边形和分辨率高的贴图文件构造对象,这也贴近人眼感觉事物的真实反映。 c. 因为路边的树木和房屋很多在显示上基本都是相同的,所以对路边的树木以及房屋对象使用了实例化技术,即把一个对象显示在不同的空间坐标中形成多个显示,而这些对象只占用一个对象的内存空间,也只有一个对象的多边形和贴图数量,这样能大量减少多边形数量,提高了实时图像渲染的效率。 d. 在路面两侧构造了透明检测多边形,此检测多边形在场景中不会被渲染,但是能够被检测,这样可以保证在仿真时汽车不进入路面以外的没有路况信息的场景区域。 4.2 图像处理实时引擎图像实时处理使用基于OpenGL的OpenGVS3D实时图像引擎软件。OpenGVS的工作流程如图5所示。图中“场景”是指所有用户软件资源对象的集合,“通道”可以认为是一个矩形端口表示的3D空间窗口,“帧缓冲”可以简单的把它当作计算机上的显示设备,“相机”就是一个观察点,只有“相机”的位置确定了,图形引擎才知道怎样去渲染“场景”。在“场景”中可以放置很多个“相机”,但只有一个是活动的,通过切换“相机”可以把视点(观察点)改变到不同的位置。OpenGVS实时引擎是这样处理图像实时生成的:调入“场景”中的各种资源如路面信息、“雾”对象、“灯光”等等,根据当前的活动“相机”形成一个“通道”,然后把OpenGVS“通道”中的图像资源经过实时图形运算传递到“帧缓冲”从而显示到计算机屏幕或投影设备上。最终根据建立的场景模型生成的实时图像场景如图6所示。 5、仿真分析
从各换挡规律模拟结果可知,百公里加速时间相对误差为6.95%,最佳动力性百公里油耗相对误差为2.54%,最佳经济性百公里油耗相对误差为2.88%,所以该系统能够很好的模拟实车工况。 6、结束语 >>相关产品 |



 。。。。。。。(3)
。。。。。。。(3)