

面向武器装备系列研制的虚拟现实灵境仿真研究

AI+ OO P 形式化体系采用人工智能A I 嵌入面向对象编程OO P 的方法建成具有过程附加能力和推理附加能力的知识表达体系和行为模型描述体系. 知识表达和知识处理作为OO P 范型上的附加机制嵌入对象. 模型对象是对仿真模型的抽象表示. 在模型内部嵌入控制模型运行的知识. 在问题求解过程中消息流触发相关的模型对象、形成一条推理链, 链上的模型对象通过传递消息合作完成问题求解.
2. 3 实现多层次集成
在形式化体系上实现功能、方法和软件工具三个层次的集成.
2. 4 基于知识的系统各部分智能合作
在A I+ OO P 统一的形式化体系上, 对“知识对象”和“非知识对象”作统一管理, 采用C+ + 语言时,
Object= Private data + set of Operat ions.
Know ledge Object= Know ledge P resen tat ion + set of Know lede u ses.
于是Message 发送到某一“Object”, 就要求执行某一操作(方法) 或使用方式, 而对象(知识) 的反应是执行要求的操作并将“控制”信号反馈给发送者.
这样, 从面向对象建模和仿真技术的观点, 对象是模型和模型运用的分割单位, 从认知工程的观点, 对象又是知识和功能的分割单位, 是本身具有一定知识处理能力的独立个体, 所以面向对象系统可以自然地联合运用深层和浅层知识, 可以嵌入多种问题求解方式, 甚至嵌入多种知识表达形式和模型种类等. 对于复杂系统行为仿真和执行多种求解策略并在解题过程中实现多种智能组织方式都具有根本的优越性.
当有实际背景的现实世界问题需要求解时, 问题驱动、目标导向的系统行为仿真建模就是解题实质内容所在. 因此, 面向复杂系统问题求解, 在数字仿真求解技术上基于知识的计算机辅助仿真技术就是基础公共设施, 在此基础上, 运用A I+ OO P 的方法去实现的是具有自学习、自优化特征的仿真求解过程, 所谓求解自动化, 简言之, 就是目标驱动下的自产生式仿真过程的自动化.
2. 5 ADOM 的对象模型ObFRAME
在ADOM 中, 对象是计算机世界中的唯一组元. 节2. 4 中所述的各组分智能合作是基于组元“对象”的智能特征的. 我们把知识工程中“框架”的三个功能槽移植至对象属性项内. 使对象具有一切传统框架描述的特点并发挥其自主操作功能, 如下表1:
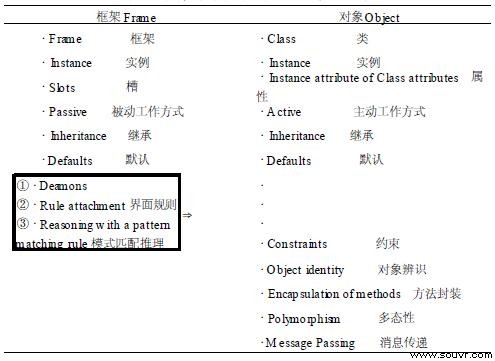
表1 所示框架表达中①- ③被移植的功能解释如下;
① Deamons 的作用是当所在槽被update, access 或delete 时即自动被激活(act ive) , 其作用相当于含有过程码, 不必通过消息传递即能自动激活的方法, 我们可在需要具备这一功能的对象中, 用方法使用的知识实现此功能, 又如
② Rule at tachment: 功能在对象中可用函数方式置换,
⑤ Reasoning w ith a pat tern match ing rule 模式匹配规则推理: 可作为推理的附加条件, 在对象中加以运用.
经过功能移植的具体实现, 使ADOM 中对描述知识而言, 其对象既具有传统描述(框架, 语义网络等) 所具备的一切功能, 更要比所有静态描述具有如何使用这一知识模型(对象) 的功能, 实现推理附加或操作过程附加. 这是用ADOM 生成自动解题过程的技术基础. 有别于一般的“对象”称谓,A I+ OO P 形式化体系中功能增强了的“对象”命名为O bFRAM E.
2. 6 ObFRAME 的形式定义描述
经过A I 注入后的对象, 即O bFRAM E 可做如下形式定义描述:
O bFRAM E∷ = 〈ID,M S,DS, KS, RS,M I〉
其中ID: O bFRAM E 名或标识; M S: O bFRAM E 受理的消息集合; DS: O bFRAM E 数据结构; KS:
O bFRAM E 知识结构; RS:O bFRAM E 推理结构;M I:O bFRAM E 受理消息名集.
因此, O bFRAM E 是一个具有局部状态和操作集合的实体, 它比通常的对象O bject 增加了根据受理消息而运用知识的功能, 乃至可以在一定条件下具有更新知识, 吸收新知识的功能, 对照文献[p. 394 ]所提出的“聪明的对象”可知O bFRAM E 当之无愧. 从这个意义上来说, A I+ OO P 实现的O bFRAM E 体系已经是Agent 族或网了. 它具有根据环境和条件调整系统状态和族(或网) 结构增删内部知识的功能. 所以它的类等价描述为:
ObFRAM E 族∷ = 〈ID, INN , DD, KD, RD, O I, ITF〉
其中ID: 族标识或名; TNN: 继承性描述;DD: 数据结构描述; KD: 知识结构描述; RD: 推理结构描述; O I:操作集合描述; ITF: 对外接口.
然而, O bFRAM E 所封装的DS 数据结构是单维数字化信息, 尚不具有对不同媒体数据所统一封装的能力. 另外, 在面向D IS 的VR 仿真开发系统中, 还需在O bFRAM E 中封装时间特性, 这可通过过程描述的多个线程来实现; 其次, 在系统组分间的智能式合作方面要改变对象被动受消息驱动的方式为自主合作的系统行为, 这就要求O bFRAM E 受理不同消息时有自主选择的能力. 除了表现拟人的精神状态需要重新考虑专用的程序设计语言外, 其基于推理的对特定消息的反应动作是可以按知识实现的.
因此, O bFRAM E 体系作为VR 仿真开发系统的支持系统, 最要紧的还是把单一数据结构向多维信息结构转换上下功夫. 鉴于面向Agent 的语言和编程AO P 尚无已获得公认的成功之作, 下面仅举我们的应用实例.
&nbs

