

基于多视几何理论的超低空摄影空间测量数据处理方法

3.1 基本矩阵
多视几何理论进行摄影测量数据处理的前提条件只需要像对有足够的重叠度,而对相机外方位元素无任何要求。像对的重叠度越大,得到的结果越可靠,即精度越高。假设一像对由A、B 两影像组成,则A 与B 上点和线的空间关系即可由基本矩阵或本质矩阵表达。基本矩阵的定义如下:
设 x 与x'分别为A与B上的对应像点,则基本矩阵F满足条件式:x'TFx = 0。F的几何意义是,点x 在B上的对应点x'必然在过B核点的直线上。F是一个3x3 的矩阵,其秩为2,因此其计算只需要7 个同名像点对即可。由于F 一般是一个奇异矩阵,因此通常须采用奇异值分解法得到稳健的结果。
3.2 投影矩阵与三维点集计算
投影矩阵的实质是摄影测量中的共线条件方程。在摄影测量中一般由一些初始值直接计算。但在多视几何理论中,投影矩阵由基本矩阵分解得到。设两影像A与B的投影矩阵分别为P1与P2,则其与基本矩阵F有如下关系(Hartley2002):
设基本矩阵为F,影像B的核点为e',且存在一个偏斜矩阵S,则P1与P2可表达为:
P1 = [I | 0] P2 = [SF | e']
通常 S可选择e'构成的斜对称矩阵,即可令S = [e']x。
令与同名像点x 与x'对应的三维点为X,则:x = P1X, x' = P2X。故当P1与P2均已知时,即可求得三维点X。
3.3 深度图与表面模型生成
通常由于通过自动提取与匹配的同名像点数量较少且分布不均,因此必须进行深度图计算以得到精确表达对象(如地面或目标表面)的点云。传统摄影测量中,一般采用沿核线匹配的方法得到地形表面模型。在多视几何中,通常先将影像为其 影像, 影像上的行扫描线即为核线,从而使深度图计算过程中的匹配限制在对应行扫描线上,以加快匹配处理。
假设影像A与B的影像分别为A'与B',则A' = H1A,B' = H2B。H 矩阵为对应矩阵,在投影中不存在平的情况下,H 矩阵了两平面间的对应点投影关系,H 的计算可以考文献(Koch, 1995)。
后的影像通过沿行扫描线进行匹配的方法得到对应点的视差也即深度。影像上所有像点的视差即构成了像对的深度图。当深度图已知时,对于续表面如地形表面而言,即可通过三角会的方法得到实的三维点云,对三维点云进一处理,即可得到对象的三维表面模型。
4 影像数据处理方法及实验系统
在本项研究中, 们采用北京东方航空公司研制的AF2000 微型无人机所获取的影像( 后文图4)。该无人机最大载荷为5kg,起飞重量为20kg,翼展2.5m,最大航高1km,续航能可达 4-5 小时。如图2 为AF2000 微型无人机。具体们采用了如下数据处理方法:

图2. AF2000微型无人机
☆ 分别对影像进行特点提取,通常采用Harris算法即可得到较理的特点,但对不同的影像内也可以选择其算法;
☆ 进行影像特点匹配,匹配的大小以及将直接影匹配的结果,一般可按图像的大小决定;由于匹配一般不可,因此通常采用RANSAC算法,具体可考文献(Hartley 2002);
☆ 由于匹配过程中同时计算基本矩阵是一种稳健的方法,因此特点匹配与基本矩阵计算通常环进行;
☆ 投影矩阵可按3 所述内 由基本矩阵分解得到。
☆ 利用对应像点,结合投影矩阵,即可得到三维点。
☆ 利用投影矩阵计算得到对应矩阵, 利用对应矩阵进行影像,得影像。
☆ 对两影像沿行扫描线进行匹配,计算得到视差深度图。依据深度图即可求得对象的三维表面模型。
为了获取稳健的结果,一般在拍摄前需要对相机进行,如有必要,在拍摄后也应对相机一次。如图3 为们基于多视几何理论开发的摄影测量数据处理实验系统。
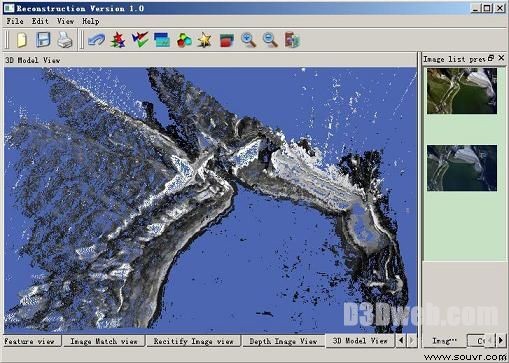
图3. 基于多视几何理论开发的摄影测量数据处理实验系统

a)

b)

c)

d)
图4. a 和b为本文实验采用的AF2000无人机获取的立体像对,
c为匹配的结果,d为深度图
图4 为实验所用像对与各主要的所得结果。图3中面图中所示为该像对最计算所得三维点云。由于采用多视几何理论进行数据处理时,对相机外方位元素无要求,因此本实验所开发的系统不可用于航空摄影情形,同时也可以很好地用于地面近景摄影测量,如图5为们为我们采用通数码相机拍摄的北大红一公 的影像对,通过一系处理得到了较好的结果。
5 结论
以上研究表明,基于多视几何理论的摄影测量数据后处理方法完全是可行而且有效的,但目前仍然是一个值得深入研究的方, 其是其应用将着小型与微型无人机系统的推广

