

Agent人工智能在虚拟现实环境中的应用


图4-1
C4与世界之间的相互作用通过数据记录(DataRecord)的形式传输,数据记录可以表示C4的感应器和感知系统所能识别的任何信息,包括声音、视觉、符号等。
图4-2是C4脑的体系框图,每一个部分都可以通过端口对黑板进行读写访问。
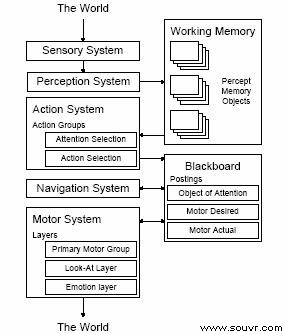
图4-2 C4脑的体系框图
4.1.1 感应系统 Sensor System
为了保持世界——Agent分离的完整性,C4采用抽象感应系统(Sensor System Abstraction)。感应系统有两个作用:
(1) 过滤器,比如牧羊狗不应该看到她后面的羊;
(2) 转换器,因为同一条信息在不同的Agent眼里意义并不相同。
4.1.2 感知系统 Perception System
感知系统将“意义(Meaning)”赋予感应到的事件。感知子(Percept)是感知系统的原子类型,又是一种数据提取单元。感知子的输入是从感应系统传过来的数据记录,返回匹配概率(SheepShapePercept返回看到的是一头羊的概率),如果概率大于阈值,同时返回提取的数据(SheepShapePercept羊的位置坐标)。C4没有对感知子的实现方式做任何假设,因此开发者可以根据需求选择算法,这是模块化增强可扩展性的直接体现。
为了提高感知效率,感知子以树形结构(图4-3)组织,每一次判断都裁减掉大量不可能的感知判断,降低复杂度;而且子感知子只接受父感知子提取的数据;减少数据量。如果一个声音信号直接传递给Sound感知子,而不再考虑Shape等感知子。每当数据记录到达,感知系统就会创建一个感知存储(PerceptMemory)对象,此后每一个感知子返回的可信度和提取的数据都保存在感知存储中。感知存储代表Agent对刺激理解的所有内容。
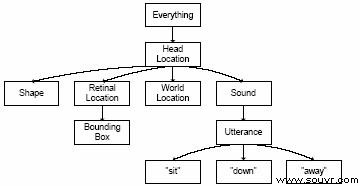
图4-3 感知子以树形结构组织
感知子不仅仅作为接受场(Receptive Field),而且会根据反应系统(Action System)的反馈,修改树的拓扑结构,动态添加子节点——称之为革新(Innovation)。
4.1.3 工作存储 Working Memory
C4包含一个Working Memory结构,储藏驻存的Percept Memory对象,保存对世界中的物体的感知历史。她们构成生物对世界的“视图(View)”。
4.1.4 预测和惊奇 Predication and Surprise
基于Percept Memory对象,生物可以模仿下意识,对现在或将来的状态作出预测。预测一般对感知存储的数据进行外推函数逼近,更复杂地考虑周期性为和知行关系。预测偶尔出现的偏差,可以作为惊奇的基础。
4.1.5 动作系统 Action System
动作是一个五元组ActionTuple:
(1) Primitive Action(s):做什么;
(2) TriggerContext:什么时候做;
(3) ObjectContext:对谁做;
(4) DoUntilContext:做多久;
(5) Intrinsic Value:做的好处。
C4有Attention Group和Primary ActionGroup两个动作组(ActionGroups),每个动作组有两条ActionTuple链表:Startle、Default。Startle具有较高的优先级,具有最高优先级的ActionTuple被激活;Default根据e-values随机的激活动作。
学习是C4的研究重点,类似人类训练狗的方法,有三种学习方式:Credit
Assignment,State-space Discovery,Innovation。
4.1.6 导航系统 Navigation System
导航系统是对动作系统的高级实现,她隐藏动作的实现细节,使动作简化成“前进、吃、离开”等一般的指令。
导航系统从动作系统接受指令,将之分解优化成恰当的运动命令,再传送给运动系统。
4.1.7 运动系统 Motor System
运动系统组织成动词图(Verb Graph),定义了最基本的运动和运动序列。运动节点是手工设置的,每个节点可以由副词空间(Adverb Space)描述,如向左、笔直、向右地行走。参数从黑板的MOTOR_DESIRED和MOTOR_ADVERB获得。
分层使生物能同步进行多个运动。如牧羊狗的头部层、身体层、尾巴层。
4.2 一种可视化的新方法 A New Approach for Visualizing
Wen的方法主要有三个部分:视觉合成(Synthetic Vision),记忆FzFSM,动画库;图4-4。

