

Bumblebee3 立体视觉拍摄系统

::产品详细::
全视场深度测量
实时3D数据转换,每秒产生100万个3D点
便于应用与集成,图像与3D数据完全建立
被动式3D传感,无需激光或投影仪
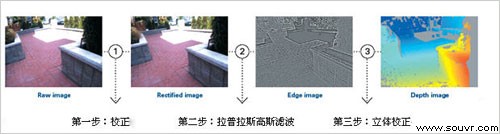
镜头畸变和相机位置偏差自动校正,无需手动在线校正
高质量CCD传感器和高速1394接口
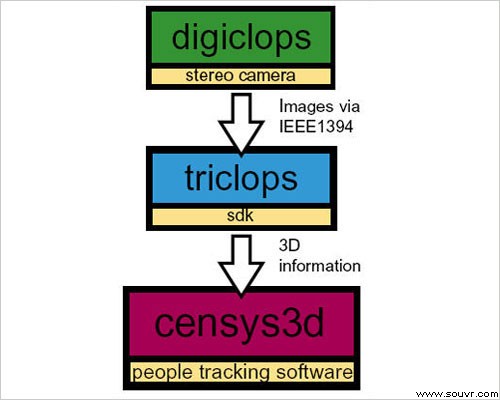
FlyCapture SDK:相机驱动API库、Demo程序及源代码
Triclops SDK:用于立体视觉产品,提供实时深度图像处理
Censys3D SDK:用于恶劣环境下精确的人物跟踪
Multiclops:多系统应用软件
体积小巧,方便外携拍摄
可实时生成点云,可二次开发
全视场深度测量
实时3D数据转换,每秒产生100万个3D点
被动式3D传感,无需激光或投影仪
镜头畸变和相机位置偏差自动校正,无需手动在线校正
高质量CCD传感器和高速1394接口
Bumblebee是一套立体视觉系统,集成了两台或三台数字相机,可实时得到场景深度信息和三维模型。产品在设计时充分考虑到用户的使用方便性,提前做好了相机及镜头参数校正,并提供了最优化的Demo软件。使用时,用户可以不用重复乏味的相机调整校正等工作,而将注意力集中在后续的软件开发和系统集成上。

硬件组成

软件系统
Point Grey ReseARCh的立体视觉产品除了提供使用方便的硬件设备外,还提供用于3D计算机视觉的软件开发包Triclops等。
软件组成
Bumblebee作为成套的三维产品被广泛用于三维世界,包括人机交互、立体视频、虚拟现实、三维跟踪、移动机器人、医疗机器人等多个领域。
一方面,由于其具有实时输入性和便携性,可以与3D头盔显示器结合做为3D显示内容输入设备。
另一方面,它可以做为一种廉价的视频采集来源,它录制下来的多路视频可直接用于多种立体显示器上进行立体显示。
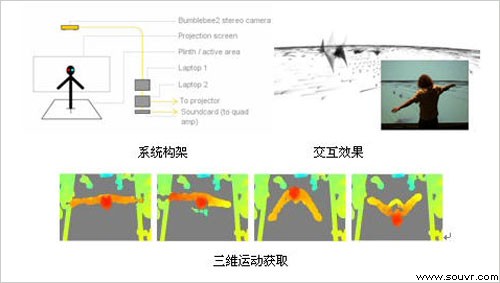
立体相机由于其可直接获取深度信息,所以可以做为3D输入设备,完成3D虚拟交互的任务。以下为一个用该立体相机进行人体3D运动捕捉,模拟鸟类飞行的交互系统。
技术特征
应用范围
适用于虚拟现实、立体视频、三维跟踪、移动机器人、医疗机器等诸多领域。
| 规格 | Bumblebee3立体视觉系统 |
| 图像传感器: | SONY1/3″逐行扫描传感器 |
| 1.3MP: | |
| 基线: | 12厘米和24厘米 |
| 焦距: | 3.8毫米,66°横向视场角,或6毫米,43°横向视场角 |
| 模数转换器: | 2bit A/D |
| 白平衡: | 手动(彩色模式) |
| 帧频: | 15fps |
接口: | 2个9针IEEE-1394a接口,用于控制和图像数据传输 |
上一篇:Miracube 3D Pro Stereographic 立体拍摄系统[ 03-12 ]
下一篇:Inition 3DVidRig-HDV高清立体拍摄[ 03-12 ]

